UNIVERSIDADE FEDERAL DE SANTA CATARINA
PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO
Ademir Goulart
AVALIAÇÃO DE MECANISMOS DE COMUNICAÇÃO EM GRUPO PARA
AMBIENTE WAN
Dissertação submetida à Universidade federal de Santa
Catarina como parte dos requisitos para a obtenção do grau de Mestre em Ciência
da Computação
Luis Fernando
Friedrich, Dr
Florianópolis, junho de
2002
AVALIAÇÃO DE MECANISMOS DE COMUNICAÇÃO EM GRUPO PARA
AMBIENTE WAN
Ademir Goulart
Esta dissertação foi julgada adequada para a obtenção
do título de Mestre em Ciência da Computação, Área de Concentração Sistemas de
Computação e aprovada em sua forma final pelo Programa de Pós-Graduação em
Ciência da Computação.
__________________________________
Prof. Luis Fernando Friedrich, Dr
__________________________________
Prof. Fernando Álvaro Ostuni
Gauthier, Dr
Banca Examinadora
__________________________________
Prof.
Luis Fernando Friedrich, Dr.
__________________________________
Profa.
Anita Maria da Rocha Fernandes, Dra
__________________________________
Prof.
Rômulo Silva de Oliveira, Dr.
__________________________________
Prof.
Vitório Bruno Mazzola, Dr.
Aos meus filhos Gabriel e Miguel
... aprendi que o mais valioso não é o que temos em nossas vidas,
mas sim quem temos em nossas vidas
AGRADECIMENTOS
A Universidade do Vale do
Itajaí, por proporcionar o apoio
necessário e o acesso aos laboratórios para a construção deste trabalho.
Ao meu orientador, Luis
Fernando Friedrich, Dr., pelo seu empenho a fim de enriquecer o trabalho e sua
pronta disposição para o atendimento
deste orientando.
Ao Alex Kuhnen pelo auxilio
na codificação dos programas de
demonstração no ambiente WINDOWS em Visual C, especialmente no tratamento da
interface gráfica.
Ao Daniel Amaral Manfredine
da UNIVALI, Oficina do Design, Campus de Balneário Camboriu, pela sua ajuda no desenvolvimento e edição
das figuras.
Ao amigo Neto, José Morelli
Neto, pela ajuda prestada no Campus de Balneário Camboriu, seja configurando
máquinas nos laboratórios para a execução dos testes ou emprestando o seu
“LINUX particular” para hospedar um daemon SPREAD.
Aos colegas professores do
Curso de Ciências da Computação da UNIVALI pelo incentivo.
A todos os demais, não
nomeados, que de forma direta ou indireta contribuíram para a realização deste
trabalho.
RESUMO
Este trabalho é um estudo sobre comunicação em grupo usada em
sistemas distribuídos. É feita uma avaliação de diversos mecanismos de
Comunicação em grupo existentes atualmente. Para uma análise mais detalhada,
são selecionados três ambientes que trabalham tanto em redes locais como em
redes de longa distância. Finalmente um dos mecanismos de comunicação em grupo
é escolhido, o SPREAD, e submetido a testes de volume, funcionalidades e
performance em um ambiente real de rede WAN. Também uma aplicação de
gerenciamento de recursos em ambiente de sistemas distribuídos foi desenvolvida
para ilustrar o uso deste mecanismo de comunicação em grupo. Concluí-se que o
SPREAD tem boa performance e escalabilidade em ambiente WAN podendo ser usado
plenamente em uma ferramenta de gerência de recursos em sistemas distribuídos.
Palavras
chaves: Comunicação em grupo, gerência de recursos, sistemas distribuídos
ABSTRACT
This paper is a study about group
communication used in distributed system. An evaluation of several mechanisms
is made about group communication available at the moment. Three environments
that work as in local area as wide area network are selected for a more
detailed analysis. Finally, one mechanism of group communication is chosen, the
SPREAD software, and it is evaluated concerning scalability, performance and
functionality using a real environment of wide area network. An application of
resource management for distributed systems was also developed to demonstrate
the facilities of this group communication software. It was conclude that SPREAD have a good performance and
scalability in WAN and can be used for developing resource management software
in distributed systems.
Key words: Group Communication, resource management,
distributed systems
Redes de computadores
estão por toda parte. A Interne é uma, como são as muitas redes que a compõem.
Redes de telefonia celular, redes corporativas, redes fabris, redes em campus,
redes domésticas, redes embarcadas, todas estas sejam redes locais LAN (Local
Area Network) ou redes de longa distância WAN (Wide Area Network),
tanto separadamente como em conjunto, compartilham as características
essenciais que fazem delas um modelo relevante para o estudo sob o título
Sistemas Distribuídos.
Uma definição de sistemas
distribuídos é aquela na qual os componentes de hardware e software localizados
em computadores interligados por rede, comunicam e coordenam suas ações somente
através da troca de mensagens (COULOURIS, 2001).
A comunicação entre os
computadores interligados, pode ocorrer de diferentes formas, usando diversos
protocolos tanto em ambiente de rede local como ambiente de redes de longa
distância. Um caso particular de comunicação ocorre quando uma mesma mensagem
tem que ser enviada para diversos computadores na rede. Alguns ambientes
físicos de rede permitem o broadcast, onde um único comando de envio manda
a mensagem para todos os endereços da rede, porém a confiabilidade deste método
não é garantida, podendo ocorrer alguma perda sem que o emissor da mensagem
seja notificado da mesma.
Com o intuito de atender
a necessidade de comunicação de um para muitos, com confiabilidade,
escalabilidade, e de forma transparente para quem desenvolve a aplicação, foi
criado um novo paradigma chamado Comunicação em Grupo. Um protocolo de
Comunicação em Grupo separa a complexidade de controle e gerenciamento das
mensagens, da complexidade da aplicação, tratando os diversos computadores como
sendo pertencentes a um grupo. Assim, o projetista se preocupa apenas com a
aplicação, suas funcionalidades, seus procedimentos, seus algoritmos
particulares, sem envolver-se com os problemas da comunicação. Passa a ser
responsabilidade do Protocolo de Comunicação em Grupo a controle de fluxo, a
confiabilidade, o sequenciamento e a garantia de entrega das mensagens ao
aplicativo final, bem como, o controle de quais computadores estão fazendo
parte deste grupo, gerenciando a entrada de novos membros no grupo, saída
voluntária ou saída involuntária devido à quebra no computador ou
particionamento da rede. Um
particionamento da rede acontece quando existe uma separação de dois
segmentos de redes que perdem a comunicação entre si.
Ao considerar a
importância dos mecanismos de Comunicação em Grupo existentes, este trabalho
visa realizar uma avaliação nas diferentes alternativas disponíveis e em
especial naquelas que tratam ambientes de redes de longa distância (WAN), onde
o particionamento, a latência e o assincronismo tornam este paradigma bem mais
complexo.
Para ilustrar de forma
prática o uso de um mecanismo de Comunicação em Grupo, será implementada uma
aplicação que visa o gerenciamento de recursos em sistemas distribuídos.
Este trabalho tem como
objetivo geral fazer uma avaliação dos mecanismos de Comunicação em Grupo para
ambiente WAN e como objetivos
específicos pode-se citar:
·
Estudar sistemas distribuídos e paralelos.
·
Estudar as características de hardware que atendem
sistemas distribuídos.
·
Estudar as características dos softwares que atendem
sistemas distribuídos.
·
Estudar os midleware (camadas de software entre
os aplicativos e o sistema operacional) de sistemas distribuídos, CORBA, JAVA
RMI, DCOM, DCE.
·
Estudar detalhadamente Comunicação em Grupo.
·
Avaliar conceitualmente os principais mecanismos de
Comunicação em Grupo.
·
Selecionar três mecanismos para um estudo mais
detalhado.
·
Selecionar um dos três para usar em uma implementação
prática.
·
Desenvolver uma aplicação para gerenciamento de recursos em um ambiente de sistemas
distribuídos.
·
Fazer uma avaliação de performance, do mecanismo
selecionado, considerando volume, escalabilidade e funcionalidades.
O uso de mecanismos de
comunicação em grupo, torna a aplicação muito simples de ser codificada, pois
toda a complexidade da comunicação, seus controles, sua segurança, seu fluxo,
passam a ser tratados de forma transparente para quem faz a aplicação. Também o fator escalabilidade é muito
importante, pois o aplicativo que roda para um computador, poderá rodar para N
computadores, sem nenhuma alteração.
No passado, quando
tinha-se apenas sistemas centralizados com o uso de terminais, o gerenciamento
dos recursos eram simples pois, todos os recursos a serem mensurados estavam
centralizados em um único local.
Com o ambiente de redes,
onde tem-se eventualmente que
administrar milhares de microcomputadores, a gerência destes recursos se
torna um problema complexo devido a localização e grande quantidade de máquinas
a serem consideradas no gerenciamento.
Assim, a idéia é
aproveitar todas as facilidades que um mecanismo de comunicação em grupo
oferece, e desenvolver uma aplicação cliente que estara rodando em todas as
máquinas, fazendo parte de um grupo geral, o qual fornece informações de
gerenciamento a um ponto central de
gerenciamento da rede, caracterizando assim uma aplicação de gerência de
recursos em sistemas distribuídos.
O mecanismo de
comunicação em grupo selecionado para ser usado na implementação de uma
aplicação prática foi o SPREAD. Assim, configura-se a rede para que em cada
segmento da mesma tenha-se um daemon, uma cópia do SPREAD executando e
todos os clientes locais deste segmento, sendo controlados por esta cópia
local. Como se tem acesso ao fonte do
SPREAD, e já estando portado para múltiplas plataformas como diversos UNIX, MAC
e WINDOWS, efetua-se a compilação em LINUX. Optou-se por rodar o SPREAD em um
servidor usando LINUX, o mesmo que hoje já é usado para os serviços de WEB e
E-mail nestes segmentos de redes.
Para os aplicativos foram
usados ambientes WINDOWS com compilador Visual C e LINUX com compilador GCC. As
aplicações em ambiente gráfico, clientes que rodam em máquinas WINDOWS, e
programa de consulta com interface gráfica, foram desenvolvidos em C e
compilados com Visual C da Microsoft. Já o programa que coleta as informações
da hora que a máquina foi ligada ou desligada, gravando um log (arquivo
com registros de controle gravados em ordem cronológica) em disco, foi
desenvolvido em C, compilado com GCC no LINUX e roda no mesmo servidor que
executa o SPREAD.
Para os aplicativos que
medem performance, avaliando o tempo no recebimento de diferentes conjuntos de
mensagens, foram empregados compiladores Visual C e GCC sendo que todos os
programas rodam tanto em WINDOWS como em LINUX.
Como ambiente de redes,
usou-se a topologia da UNIVALI, com redes locais, servidores locais em cada um
dos Campi, usando fast ethernet e gigabit ethernet sendo os
pontos de rede geralmente ligados a switch. Os segmentos locais estão
interligados ao Campus principal de Itajaí por links WAN de 2 Megabits.
O presente documento
contém inicialmente o capítulo 2 onde é apresentada a conceituação básica para
sistemas distribuídos. Além das características relativas ao hardware e os
softwares básicos que atendem o conceito de sistemas distribuídos, também o
paradigma de orientação a objeto é abordado. Assim como, o uso de CORBA, JAVA
RMI, DCOM e DCE são considerados nesta parte de conceituação básica.
O capítulo 3, é
inteiramente dedicado para detalhar conceitualmente o que é Comunicação em
Grupo, com suas características, funcionalidades, requisitos e padrões adotados.
No capítulo 4,
tem-se uma visão geral de diversos
mecanismos de Comunicação em Grupo, com suas características principais. Como foram selecionados três ambientes para
um estudo mais detalhado, cada um deles passa a ser detalhado em um capítulo
específico, sendo no capítulo 5 o INTERGROUP, no capítulo 6 o JGROUP e no
capítulo 7 o SPREAD.
A descrição da aplicação
de gerência de recursos em ambiente distribuído, bem como os resultados da
avaliação de desempenho estão detalhados no capítulo 8.
Para finalizar tem-se a
conclusão no capítulo 9 e na seqüência os anexos com os programas fontes que
foram desenvolvidos para avaliação de desempenho usando o SPREAD.
Neste capitulo, apresenta-se uma série de conceitos que são importantes
para o perfeito entendimento e enquadramento do assunto objeto, Comunicação em
Grupo. Inicia-se com uma caracterização dos sistemas distribuídos e paralelos,
bem como, apresentando motivações para o uso de sistemas distribuídos. Na
seqüência é abordado o aspecto de hardware, apresentando arquiteturas
atualmente em uso para sistemas distribuídos. Os aspectos de software como
sistemas operacionais, linguagens de programação e ambientes distribuídos
também são explorados neste capítulo.
Para encerrar a conceituação básica, apresentam-se as arquiteturas
adotadas na comunicação de sistemas distribuídos.
Os primeiros computadores produzidos para uso comercial, na década de 70,
tinham uma estrutura padrão baseada em processador, memória e armazenamento de
dados. Devido ao alto custo dos componentes, na época, as capacidades de
memória e de discos destes precursores dos equipamentos hoje conhecidos como mainframe, eram mínimas se comparado com equipamentos atuais.
Para exemplificar um modelo de
equipamento IBM 360/30, tinha memória de 32Kb, 3 discos de 10 MB, leitora
perfuradora de cartões, leitora de fita de papel, e 6 unidades de fitas
magnéticas. Na evolução tem-se os minicomputadores, os microcomputadores, o
computador pessoal ou PC e a interligação dos equipamentos em rede.
A interligação das máquinas em redes propiciou o surgimento do conceito
de sistemas distribuídos, aproveitando o potencial das máquinas interligadas.
De outro lado, tem-se os sistemas compostos de um único processador, memória e
periféricos os quais são chamados de sistemas centralizados. Segundo Tanenbaum
(1995), no passado era válido a Lei de Grosch, um especialista em computação,
preconizando que “o poder computacional de um processador é proporcional ao
quadrado de seu preço, ou seja, pagando duas vezes mais, pode-se obter o
quádruplo da performance”. Hoje em dia esta Lei de Grosch não é mais válida,
pois com as novas tecnologias, em especial usando arquitetura INTEL a cada ano,
pelo mesmo preço, obtemos o dobro ou o quádruplo de performance em relação ao
equipamento anterior.
Quando se avalia o custo de micros pessoais PC, encontra-se ótima relação
preço/performance. Quando se coloca uma máquina, independente para cada
usuário, tem-se a dificuldade de compartilhar os dados. Além da comunicação
necessária entre os usuários, é desejável o compartilhamento de recursos tais
como impressoras, gravador de CD, etc. Este compartilhamento é possível se as
máquinas estiverem interligadas em rede. Assim um sistema distribuído pode ser
implementado com computadores pessoais ligados em rede a servidores, os quais
executariam os processos mais pesados
de forma distribuída.
Apesar de todas as vantagens dos sistemas
distribuídos, encontram-se algumas dificuldades neste ambiente. O software para
sistemas distribuídos é mais complexo. Desta forma sistemas operacionais,
linguagens e mesmo aplicativos para este ambiente são relativamente novos, em
fase de pesquisa, e não estão plenamente consolidados. Também a rede para
interligar, seja rede local (LAN- Local Area Network) ou rede de longa
distância (WAN- Wide Area Network), não tem a confiabilidade total para
a interligação, podendo ocorrer perda por interrupção do link (caminho
que interliga fisicamente dois pontos de rede) ou saturação devido à sobrecarga
na banda disponível. Cabe então as soluções de software, tratar estas
interrupções com protocolos e rotinas adequadas a este contexto. Um resumo das
características de sistemas distribuídos, é mostrado no Quadro 1 segundo Tanenbaum (1995).
As estratégias adotadas para a implementação
de sistemas distribuídos dependem de diversos fatores. Tem-se que levar em
conta o objetivo da aplicação, as características e restrições do ambiente, o
custo do projeto, etc. As estratégias mais importantes, segundo Veríssimo
(2001), são: distribuição para informação e compartilhamento de recursos;
distribuição para maior disponibilidade e performance; distribuição para
modularidade; distribuição para a descentralização e distribuição para
segurança.
Quadro
1
Características de Sistemas Distribuídos
|
ITEM
|
DESCRIÇÃO
|
|
Relação Custo Benefício
|
Os microprocessadores oferecem uma melhor
relação preço/performance do que a oferecida pelos mainframes.
|
|
Desempenho
|
Um sistema distribuído pode ter um poder
de processamento maior que o de qualquer mainframe.
|
|
Confiabilidade
|
Se uma máquina sair do ar, o sistema como
um todo pode sobreviver
|
|
Crescimento Incremental
|
O poder computacional pode crescer em
doses homeopáticas
|
|
Compartilhamento
|
Permite que mais de um usuário acesse uma
base de dados comum, ou periféricos muito caros.
|
|
Comunicação
|
Torna muito mais simples a comunicação
pessoa a pessoa, por exemplo, empregando o correio eletrônico.
|
|
Flexibilidade
|
Espalha a carga de trabalho por todas as
máquinas disponíveis ao longo da rede.
|
|
Restrições
|
Até o presente momento não há muita
disponibilidade de software para os sistemas distribuídos. Pode-se ter
problemas de muito tráfego na rede ou problemas com segurança dos dados.
|
As estratégias adotadas para a implementação
de sistemas distribuídos dependem de diversos fatores. Tem-se que levar em
conta o objetivo da aplicação, as características e restrições do ambiente, o
custo do projeto, etc. As estratégias mais importantes, segundo Veríssimo
(2001), são: distribuição para informação e compartilhamento de recursos;
distribuição para maior disponibilidade e performance; distribuição para
modularidade; distribuição para a descentralização e distribuição para
segurança.
Alguns compromissos precisam ser atendidos,
dependendo das particularidades das aplicações:
·
Controle centralizado versus descentralizado –
Controle centralizado é mais fácil de implementar e gerenciar. Contudo, alguns
problemas de descentralização e natureza distribuída, são melhores resolvidos
com aplicações descentralizadas. Também podem ser consideradas arquiteturas
intermediárias com transparência distribuída, mas de controle centralizado.
·
Distribuição seqüencial versus concorrente
- O uso do processamento concorrente,
onde tem-se diversos procedimentos executando ao mesmo tempo devido a
requisições simultâneas, comparativamente ao processamento seqüencial no caso
de chamadas que podem ser atendidas uma a uma.
·
Distribuição visível versus invisível – Pode-se
dizer que a distribuição é invisível ou transparente quando se usam modelos que
escondem a distribuição. Assim em modelos usando RPC (Remote Procedure Call),
CORBA (Common Object Request Broker Architecture) ou DCOM (Distributed
Component Object Model) a distribuição se torna transparente. Distribuição
visível é quando a aplicação se vale de mecanismos de passagem de mensagens,
tais como orientados a grupos e modelos usando
barramento de mensagens.
·
Envio de dados versus código – O que é
distribuído, dados ou código? Normalmente distribuem-se dados para serem
processados em equipamentos diferentes, porém, é possível também, enviar código
para processar as instruções localmente, como no caso de applets.
·
Servidor versus serviço – Deve-se considerar que
um serviço pode estar em mais do que um servidor e que em um servidor pode-se
estar executando diversos serviços.
·
Escala versus performance – A escalabilidade
normalmente é inversamente proporcional à performance. Uma boa arquitetura que
permita escalabilidade, ou seja, possa crescer em número de componentes, não
deve ter a sua performance linearmente diminuída, devido a este
crescimento.
·
Sincronismo versus assincronismo – Assíncronos
são sistemas mais simples, mas independentes de tempo, enquanto síncronos são
sistemas mais complexos e tem a habilidade de assegurar especificações de
controle de tempo.
Muitos destes compromissos podem ser
avaliados em conjunto e assim pode-se classificar a distribuição como segue:
·
Distribuição em baixa escala – Em ambientes mais
homogêneos usando LANs ou redes de alta velocidade, onde um comportamento
controlado pode ser obtido para aplicações que requerem segurança e sincronismo
·
Distribuição em larga escala – Em ambientes de
sistema distribuídos, em ambientes abertos, tipicamente de natureza
heterogênea, sobre WANs interconectando LANs onde o comportamento é incerto e
aplicações podem existir de forma não síncrona.
Esta é a forma como nasceram sistemas
distribuídos e ainda é o objetivo estratégico da maior parte dos sistemas
distribuídos. A tecnologia que diz respeito a esta estratégia de implementação,
está relacionada com servidores centrais, protocolos de sessão remota,
computação cliente-servidor, HTTP, cliente leve e computação em rede. Também
está relacionada com as clássicas formas de disseminação da informação como
NEWS, BBS e e-mail. Os esforços estão concentrados no lado do usuário,
para garantir o acesso às informações e recursos que residem em servidores
centrais. São importantes neste contexto o gerenciamento de usuários, segurança
no estabelecimento da sessão, largura de banda e confiabilidade e software no
lado cliente.
Na estratégia de distribuir para maior
disponibilidade e performance, o que se tem é a vantagem de diversos servidores
contra um único servidor central ou mesmo mainframe. Se se tem um único
ponto de falha com servidor central, com múltiplos servidores tem-se uma
disponibilidade muito maior, pois em caso de queda de um dos servidores, ainda
tem se a disponibilidade de atendimento por outros servidores. Quanto à
performance, um único equipamento tem um limite na sua performance, enquanto
que com diversos servidores tem se a possibilidade de balancear o acesso aos
servidores, o que nos dará uma performance muito superior a de um único
servidor central.
Mesmo para uma empresa que tenha todas as
facilidades de computação centralizadas, onde todos os usuários estão no mesmo
ambiente, ainda assim, a modularidade é relevante como uma das
estratégias. Mesmo com um custo
superior se comparado a um único sistema integrado, na modularidade podemos ter
benefícios no gerenciamento das incertezas quanto ao crescimento da organização
e sua atividade (geografia, escala, reengenharia, reorientação, mercados, etc).
Em atendendo a modularidade, adicionalmente têm-se as vantagens discutidas
anteriormente de disponibilidade e performance.
Diversas atividades conduzidas por pessoas
nas organizações, são descentralizadas pela natureza da própria atividade.
Antes dos sistemas distribuídos, ou se
tinha esta facilidade de computação em um computador central, ligando terminais
remotos aos locais do usuário ou se tinha ilhas de processamento com
computadores isolados atendendo estas aplicações descentralizadas. Com a estratégia de distribuir para a
descentralização, passa-se a ter integração e ao mesmo tempo a disponibilidade
em áreas descentralizadas das empresas. Esta estratégia permite descentralizar
o controle, colocando ele onde for necessário, enquanto mantém o grau de
integração e coordenação entre os diferentes pontos distribuídos.
A segurança pode ser aumentada quando se tem
distribuição. Em áreas de proteção e criptografia baseadas em servidores de
votação, tem se mais robustez se comparado a sistemas de um único servidor.
Sistemas de arquivamento baseados em fragmentação e espalhamento em diversos
servidores de arquivos, aumentam a segurança se comparado a servidor único que
contém o arquivo inteiro.
Segundo Buyya (1999), “a principal razão para a criação e o uso de
computadores paralelos é que o paralelismo é uma das melhores formas de
resolver o problema de gargalo de processamento em sistemas de um único
processador”. A relação preço
performance de um pequeno sistema de processamento paralelo em cluster é muito
melhor se comparado com um minicomputador.
Quadro
2 Características Principais dos Computadores
Paralelos
|
Características
|
MPP
|
SMP CC-NUMA
|
Cluster
|
Distribuição
|
|
Número de Nós
|
0(100)- (1000)
|
0(10)-0(100)
|
0(100)ou menos
|
0(10)-0(1000)
|
|
Complexidade
do Nó
|
Granularidade
fina ou média
|
Granularidade
Média ou grossa
|
Granularidade
média
|
Alcançe largo
|
|
Comunicação
inter Nos
|
Troca
mensagens / variáveis compartilhadas
|
Centralizada
e Memória compartilhada distribuída
|
Troca
de mensagens
|
Arquivos compartilhados, RPC , IPC e troca
mensagens
|
|
Controle
de jobs
|
Fila
única no host
|
Fila
única geralmente
|
Múltiplas
filas mas coordenadas
|
Filas
independentes
|
|
Suporte
a SSI Imagem de Sistema Único
|
Parcialmente
|
Sempre
no SMP e alguns NUMA
|
Desejável
|
Não
|
|
Copias
de SO e tipo
|
N
micro-kernel monolítico ou SO em camadas
|
Um
monolítico SMP e muitos para NUMA
|
N
SO plataforma homogênea ou micro-kernel
|
N
SO plataforma homogêneas
|
|
Espaço
endereçamento
|
Múltiplo
– Simples para DSM
|
Simples
|
Múltiplo
ou Simples
|
Múltiplo
|
|
Segurança
entre os nós
|
Não
necessário
|
Não
Necessário
|
Requer
se exposto
|
Requer
|
|
Onde
se aplica
|
Uma
Empresa
|
Uma
Empresa
|
Uma
ou mais empresas
|
Muitas
empresas
|
O desenvolvimento e a produção de
sistemas de moderada velocidade usando arquitetura paralela é muito mais barato
do que o seu equivalente em performance para sistemas de um único processador.
A taxonomia das arquiteturas de computadores paralelos, de acordo com seus
processadores, memória e forma de interconexão pode ser (BUYYA, 1999):
·
MPP (Massively Parallel Processors)
Processadores Paralelos
·
SMP (Symmetric Multiprocessors) Multiprocessadores
simétricos
·
CC-NUMA (Cache-Coherente Nonuniform Memory Access)
Processador com memória cache e que também acessa as memórias dos outros
processadores
·
Sistemas Distribuídos
·
Cluster
O Quadro 2 mostra uma comparação das características funcionais
e arquitetura destas máquinas.
A classificação de Buyya (1999), segue a classificação de Tanenbaum
(1995), que é mais geral e que refina a classificação apresentada por Flynn
apud Tanenbaum (1995), para arquitetura de computadores. A taxonomia de Flynn
leva em consideração fluxo de instrução e fluxo de dados, como segue:
·
SISD – Single Instruction Stream, Single Data Stream
– Um único fluxo de instruções e um único fluxo de dados.
·
SIMD – Single Instruction Stream, Multiple Data
Stream – Um único fluxo de instruções e múltiplo fluxo de dados.
·
MIMD – Multiple Instruction Stream, Multiple Data
Stream – Múltiplo fluxo de instruções e múltiplo fluxo de dados.
Para Tanebaum (1995), as máquinas com múltiplo fluxo de instruções e
múltiplo fluxo de dados ainda se dividem nos chamados multiprocessadores,
para os que têm memória compartilhada e multicomputadores para os que
não tem memória compartilhada. Tanto os multiprocessadores como os
multicomputadores podem ser divididos em duas categorias, tomando por base a
arquitetura de rede de interconexão, sendo uma do tipo baseada em barramento e
outra comutada respectivamente. Os
multiprocessadores cuja conexão é feita com barramento, ou seja um backplane
de alta velocidade, são também chamados de fortemente acoplados e os
multicomputadores interligados via rede ou outros dispositivos comutados em
baixa velocidade, são também chamados de fracamente acoplados. A Figura 1 (TANENBAUM, 1995), mostra esta classificação para os
sistemas distribuídos e paralelos.
Figura
1 Uma
Taxonomia para Sistemas Distribuídos e Sistemas Paralelos
A característica básica dos multiprocessadores é que a comunicação entre
os processadores se dá através de memória compartilhada. Uma área única de
memória sendo acessada simultaneamente por diversos processadores pode causar
um gargalo. Assim, o conceito de memória de alta velocidade de acesso também
conhecido como memória cache, passa a ser adotado, tendo cada
processador a sua memória cache própria. Para manter todos os cache
atualizados uma técnica chamada write-trhough onde toda a gravação é
feita na memória principal e a leitura na memória cache. Também todas as cache ficam
monitorando o barramento e se uma alteração ocorre na memória principal cujo
endereço também está na cache de um processador este atualiza o conteúdo
da cache. A Figura 2 (TANENBAUM,
1995), ilustra um sistema distribuído baseado em barramento.
Figura
2 Sistema Distribuído Baseado em Barramento
Os sistemas multiprocessadores podem também ser ligado por comutação.
Assim divide-se a memória em blocos e o acesso dos processadores aos blocos de
memória pode ser feito através de comutação crossbar como mostra a Figura 3 (TANENBAUM, 1995). Em cada intersecção existe uma
chave eletrônica que pode ser aberta ou fechada por hardware.
Figura
3
Comutação Crossbar
Alternativa é usar uma solução denominada rede Omega, onde cada chave tem
duas entrada e duas saídas reduzindo o número de comutações de n² para nlog2n.
A Figura 4 (TANENBAUM, 1995), mostra esta alternativa para n
igual a 4.
Figura
4
Rede Omega
Esta alternativa exige chaves de comutação muito rápidas e se tivermos um
número de processadores muito grande as chaves de comutação se tornam um
gargalo.
Os sistemas multicomputadores, onde não se tem memória compartilhada
entre os processadores, não apresentam as dificuldades citadas anteriormente.
Para os sistemas multicomputadores ligados em barramento a interconexão pode
ser feita via rede local onde a velocidade de placas de 100 a 1000 Mbps é suficiente
para o tráfego de comunicação processador-a-processador. Esta conexão é
suportada inclusive entre redes de maior distância com largura de banda
adequada, usando tecnologia como ATM ou Gigabit Ethernet. Na Figura 5 (TANENBAUM, 1995), pode-se ver um conjunto de
estações de trabalho ligada em rede que ilustram este sistema multicomputador
baseado em barramento.
Figura 5 Sistema
Constituído por Computadores Interligados em Rede
Outra forma de ligação de multicomputadores é a interligação por
comutação. Duas topologias são apresentadas por Tanenbaum (1995), sendo a
primeira chamada de topologia em grade, facilmente implementada em placas de
circuito impresso, e mostrada na Figura
6.
Figura 6 Topologia em Grade
A segunda topologia é chamada de hipercubo, onde os vértices representam
os processadores e os lados às interligações entre os processadores. Na Figura 7 (TANENBAUM, 1995), uma representação para este
esquema com dimensão 4 onde cada processador está ligado a outros 4
processadores.
Figura 7 Topologia em Hipercubo
Nesta forma de hipercubo à medida que se aumenta o número de
processadores maior fica o caminho para os processadores se comunicarem entre
si, pois a interligação não é direta e sim via os processadores que são
vizinhos na interligação.
Segundo Buyya (1999), “cluster é um tipo de sistema de processamento
distribuído ou paralelo, o qual consiste de um conjunto de computadores
interligados trabalhando juntos como se fosse um único recurso de computação
integrada”. Um nó pode ser um computador multiprocessado ou monoprocessado (PC,
estação de trabalho ou SMP) com memória, facilidade de I/O e sistema
operacional. Um cluster geralmente se refere a dois ou mais computadores
(nós) conectados entre si. Os nós podem estar em um único gabinete ou
interligados via LAN. A Figura
8 mostra uma arquitetura típica de um cluster (BUYYA,
1999).
Figura 8 Arquitetura Típica de um Cluster
Cluster oferece as seguintes facilidades a um custo relativamente
baixo:
·
Alta
performance
·
Escalabilidade
e facilidade de expansão
·
Alta performance
de processamento
·
Alta
disponibilidade
A tecnologia de cluster permite aumentar o poder de processamento,
usando tecnologia comum a preços
relativamente baixos. Isto devido ao uso de hardware e software, que são
padrões de mercado e com preços muito abaixo dos convencionais então
existentes. Um benefício muito importante quando se usa cluster é a
capacidade de suportar falhas, pois, se um nó do cluster deixa de
funcionar, o sistema como um todo ainda continua funcionando, apenas com uma
performance inferior devido ao nó que deixou de processar.
A interconexão entre os nós de um sistema em cluster pode ser
feita usando redes de alta velocidade com protocolo standard como TCP/IP ou
protocolos de baixo nível como Mensagens Ativas. O mais comum é que se use
placa de rede do tipo Ethernet. Em termos de performance, latência e largura de
banda, esta tecnologia está evoluindo. Uma conexão Ethernet simples não pode
ser usada como base para uma ligação cluster, pois a latência e a
largura de banda não estão de acordo com o poder computacional que temos nas
atuais estações de trabalho. Deve-se esperar que na interconexão de cluster
tenha-se largura de banda superior a 10 Mbytes/s e tempo de latência menor que
100 μs. Algumas das tecnologias de rede de alta performance, segundo Buyya
(1999), são apresentadas a seguir:
·
Ethernet, Fast Ethernet e Gigabit Ethernet
- A ethernet tem se tornado um padrão em redes de estações de trabalho.
Inicialmente tínhamos as placas de 10 Mbps,
seguidas pelas placas fast ethernet com velocidade 100 Mbps
usando hubs ou switch e atualmente, o estado da arte, é a placa gigabit ethernet que mantêm a
mesma simplicidade da arquitetura ethernet permitindo velocidades da
ordem de gigabit por segundo. Pode-se
também agregar múltiplas placas, formando um fluxo único com a
transmissão de diversas placas simultaneamente, chamado trunking, e
tem-se uma interconexão de alta velocidade entre as estações da rede.
·
Asynchronous Transfer Mode (ATM) - ATM é
uma tecnologia de circuito virtual chaveado, originalmente desenvolvida para a
indústria de telecomunicações. Baseado na transmissão de pequenos pacotes de
dados chamados células pode ser usado tanto em LAN como WAN. As placas com
tecnologia ATM têm um preço muito caro e não são largamente adotadas.
·
Scalable Coherente Interface (SCI) - O
objetivo do padrão SCI, ANSI/IEEE 1596-1992, é essencialmente prover um
mecanismo de alta performance que suporte o acesso à memória compartilhada
coerente, entre um grande número de máquinas. Esta transferência é feita com um
tempo de espera (delay) de poucos μss. Esta tecnologia não é
largamente empregada, seu custo é bastante alto e podemos encontrar em algumas
arquiteturas proprietárias de memória logicamente compartilhada e fisicamente
distribuída, tais como HP/Convex Exemplar SPP e Sequent NUMA-Q 2000 (DIETZ,
1998).
·
Myrinet - É uma solução proprietária da
empresa Myricom (2001), de alta performance para interconexão a 1.28 Gbps full
duplex. Myrinet usa switch roteadores cut-through de baixa
latência, oferecendo tolerância à falha pelo mapeamento automático da
configuração de rede. Tem baixo tempo de latência (5 μs sentido único,
ponto a ponto), excelente performance e grande flexibilidade devido ao
processador programável em sua placa.
Outras tecnologias de rede e formas de interligação de computadores tais
como, ArcNet, CAPERS, FC (fibre channel), FireWire (IEEE 1394), HiPPI e
serial HiPPI, IrDA (Infrared Data Association), Parastation, PLIP, SCSI,
ServNet, SHRIMP, SLIP, TTL_PAPERS, USB e WAPERS estão descritas em (DIETZ,
1998).
O software em Sistemas Distribuídos seja aplicativo ou mesmo
um sistema operacional, tem que estar de acordo com as características dos
Sistemas Distribuídos. Diferentemente de um sistema monoprocessado no ambiente
de Sistemas Distribuídos existem as necessidades de sincronismo, interação,
controles, entre os diferentes ambientes de software, ou diferentes instâncias,
que compõem o sistema total. Para o usuário final, tudo deve parecer como se
fosse um único recurso de computação que está sendo usado para o processamento
das necessidades do usuário. Neste contexto, vamos fazer a seguir, algumas
considerações sobre os sistemas operacionais e sobre a programação de aplicativos.
Segundo Buyya (1999), um sistema operacional moderno provê dois serviços
fundamentais para o usuário. Primeiro
ele permite utilizar o hardware de um computador mais facilmente criando uma
máquina virtual que difere da máquina real facilitando o uso da mesma por
usuários finais. Segundo, um sistema operacional compartilha recursos de
hardware entre os usuários. Um dos mais importantes recursos é o processador.
Um sistema operacional que trabalha com mais de um processo simultaneamente (multitask),
como o Unix ou WINDOWS NT, divide o trabalho que necessita ser executado pelo
processador, dando a cada processo memória, recursos do sistema e uma fração de
tempo do processador. O sistema operacional executa um processo (thread)
por um curto espaço de tempo e depois muda para outro, executando um a um
sucessivamente. Assim mesmo em um sistema com um único processador, temos a
impressão de múltiplas execuções simultâneas, pois cada processo está sendo
atendido pelo processador em pequenas frações de tempo. Um usuário pode editar
um documento, enquanto um relatório está sendo impresso e uma compilação está
sendo executada. Para o usuário tudo se parece como se os três programas
estivessem rodando simultaneamente.
De acordo com Tanenbaum (1995), pode-se distinguir dois tipos de sistemas
operacionais para sistemas com vários processadores: os sistemas operacionais
fracamente acoplados e os fortemente acoplados. Sistemas fracamente acoplados são aqueles onde temos as estações
independentes ligadas por rede local. Cada estação tem o seu sistema
operacional. Os nodos têm baixo grau de interação e interagem quando
necessário. Se a rede local cai, aplicações individuais em cada estação podem
continuar. Sistema fortemente acoplado é aquele onde o software integra,
fortemente cada nodo da rede. Se a interligação dos processadores for
interrompida, a aplicação também será descontinuada. Segundo os conceitos já
apresentados tem-se:
·
Sistemas Operacionais de Rede – Software
fracamente acoplado em hardware fracamente acoplado.
·
Sistemas Operacionais Distribuídos – Software
fortemente acoplado em hardware fracamente acoplado.
·
Sistemas Operacionais de Multiprocessadores –
Software fortemente acoplado em hardware fortemente acoplado.
Sistemas Operacionais (SO) de Rede
permitem compartilhar diferentes recursos de uma determinada estação
entre os demais membros da rede. Um dos recursos mais importantes para ser
compartilhado é o disco, permitindo que múltiplas estações possam acessar uma
única base de dados. Diversos produtos comerciais estão disponíveis, entre eles
Rede Novell da Novell, Inc, WINDOWS NT da Microsoft e NFS (Network File
System) da SUN Microsystems. O NFS se tornou um padrão de mercado e hoje
todos os UNIX têm uma implementação de NFS. Permite que uma determinada área de
disco, um diretório ou conjunto de diretórios, seja exportado para outras
máquinas da rede. No servidor existe um arquivo de configuração onde se dá
permissão de acesso explicitando qual área e que modo de acesso cada máquina
cliente vai estar autorizada nesta interligação. Na máquina cliente se monta um
determinado diretório da máquina servidora sob o sistema de arquivos local e a
área compartilhada para ser vista como se fosse parte da estrutura de arquivos
do sistema local. Qualquer máquina com S.O. Unix pode ser cliente e/ou
servidora de um sistema NFS e a Figura
9 (TANENBAUM, 1995), mostra a estrutura em camadas dos
componentes envolvidos em uma ligação Cliente / Servidor.
Figura 9 Estrutura em Camadas do NFS
Sistemas verdadeiramente
distribuído, vão além do simples uso do NFS.
“Um sistema distribuído é aquele que roda em um conjunto de máquinas sem
memória compartilhada, máquinas estas que mesmo assim aparecem como um único
computador para seus usuários” (TANENBAUM, 1995). Deve haver um sistema de
comunicação entre processo, único e global
que permita que qualquer processo fale com qualquer outro. Também deve
haver um esquema de proteção
global. A gerência dos processos também
precisa ser a mesma em todo o sistema. A forma como um processo é criado,
destruído, inicializado e finalizado, não pode variar de uma máquina para
outra.
Sistemas Multiprocessadores de tempo compartilhado, combinação de
software fortemente acoplado com hardware fortemente acoplado, são voltados
para processamentos específicos. A
característica fundamental desta classe de sistema é a existência de uma única
fila de processos prontos: uma lista de todos os processos do sistema que não
estão bloqueados, e que só não estão rodando por falta de processador
disponível. O sistema da Figura
10 (TANENBAUM, 1995) mostra uma situação com três
processadores e cinco processos prontos para rodar.
Figura 10 Um Multiprocessador com uma Única Fila de
Processos Prontos
Segundo Stallings (1998), um sistema operacional de redes não é
atualmente um sistema operacional, mas sim um conjunto distribuído de softwares
de sistema para suportar o uso de servidores em uma rede. A máquina servidora
provê serviços para a rede como gerenciamento de impressora e compartilhamento
de arquivos. Cada computador da rede tem seu próprio sistema operacional. O
sistema operacional de redes é simplesmente um complemento ao sistema
operacional local que permite a interação entre as máquinas de aplicação com a
máquina servidora. Já um sistema operacional distribuído é um sistema
compartilhado por uma rede de computadores. Aparece para o usuário final como
se fosse um único sistema operacional, mas fornece acesso transparente a
recursos de diversas máquinas. Um sistema operacional distribuído pode
aproveitar uma arquitetura de comunicação já existente, no entanto mais
comumente um conjunto de instruções básicas para funções de comunicações é
incorporado ao sistema operacional de forma a prover mais eficiência.
A implementação do sistema uniprocessador virtual só é possível se
tivermos memória compartilhada para serem acessadas pelos multiprocessadores.
Esta solução para redes de computadores fica muito difícil, senão impossível,
devido à baixa velocidade e alta latência no processo de intercomunicação entre
os processadores.
Do ponto de vista da aplicação, a forma como os programas podem ser
desenvolvidos bem como o uso dos recursos existentes, estão relacionados com a
arquitetura de processamento paralelo ou processamento distribuído. Segundo
Radajewski (1998), tem-se basicamente duas formas de comunicação entre os
processos durante a sua fase de execução:
1. Usando
threads (linhas de execução, parte do código que roda independente),
recurso do sistema operacional, em máquinas de memória compartilhada, onde as
comunicações são feitas através da memória diretamente, em máquinas do tipo SMP;
2. Via
mensagens, em máquinas onde o acesso à memória é feito através de mensagens que
são trocadas entre os processos de cada máquina, exemplo Cluster ou
interligadas em rede.
Tanto mensagens quanto threads podem ser implementadas em SMP,
NUMA-SMP e cluster embora eficiência e portabilidade em cada caso, tenham as
seguintes considerações:
·
Mensagens - historicamente a tecnologia de troca
de mensagens refletia o projeto dos primeiros computadores paralelos com
memória local. Mensagens requerem que os dados sejam copiados enquanto threads
usam os dados no mesmo local. A latência e a velocidade com que as mensagens
podem ser copiadas são os fatores limites neste modelo de troca de mensagens.
Uma mensagem é bastante simples: alguns dados e um processador de destino.
Alguns mecanismos comuns são interfaces de programas de aplicação tais como PVM
(Parallel Virtual Machine) ou MPI (Message Passing Interface). O
mecanismo de troca de mensagens pode ser eficientemente implementado usando threads
e terá bom resultado tanto em máquinas SMP como entre clusters e máquinas em
rede.
·
Threads - as threads em sistema
operacional foram desenvolvidas devido ao projeto de compartilhamento de
memória o que permitiu uma comunicação em memória muito rápida e sincronização
entre as partes de programas concorrentes. As threads funcionam bem em
sistemas SMP por que a comunicação é feita através da memória compartilhada. O
problema com threads é a dificuldade de estender o uso além de máquinas
SMP pois sendo os dados compartilhados entre CPUs o overhead para atualizar o
cache de memória, coerência de cache, seria muito grande. Para estender threads
eficientemente além dos limites do SMP, seria necessário usar a tecnologia NUMA
o que é muito caro.
A programação paralela ou programação distribuída terá realmente vantagem
com esta arquitetura de sistemas paralelos e sistemas distribuídos se a
aplicação for adequada para este ambiente. Inicialmente considera-se a
diferença entre concorrência e paralelismo. Partes concorrentes são partes de um programa que podem ser executados
independentemente. O paralelismo é quando temos partes concorrentes deste
programa que podem ser executadas ao mesmo tempo em elementos de processamento
separados. A distinção é muito importante pois concorrência é uma propriedade
do programa e um eficiente paralelismo é uma propriedade do equipamento. A
tarefa do programador é identificar que parte concorrente pode ser executada em
paralelo e qual parte não pode.
O
Ambiente de Computação Distribuída, (DCE – Distributed Computing Environment)
é uma tecnologia de software desenvolvida pelo Open Group (OPEN, 1999), que
permite o desenvolvimento de aplicações distribuídas usando sistemas
heterogêneos. O Open Group é um consórcio de usuários e de fornecedores de
computadores que trabalham em conjunto visando à tecnologia de sistemas
abertos. A organização integra as melhores tecnologias e fornece para que sejam
adotadas pelas industrias. Através do Open Group, diversos segmentos da
empresas trabalham de forma cooperativa para a evolução do DCE. Algumas áreas
críticas que são atendidas por esta tecnologia:
·
Segurança
·
Internet / Intranet
·
Objetos Distribuídos
A tecnologia DCE foi projetada para trabalhar independente de qual sistema
operacional ou qual tecnologia de rede está sendo usada pela aplicação. Assim
permite uma interação entre clientes e servidores em qualquer tipo de ambiente,
mesmo heterogêneo, que a organização possa ter.
O
Open Group fornece o código fonte do DCE os quais os fornecedores incorporam a
seus produtos. Muitos fornecedores já agregam funções básicas do DCE junto com
os seus sistemas operacionais. A tecnologia inclui serviços de software que
residem acima do sistema operacional, fornecendo interface (middleware)
para os recursos de baixo nível do sistema operacional e recursos de rede.
Estes serviços permitem que a organização possa distribuir o processamento e os
dados através de toda a empresa. Atualmente DCE é o único ambiente integrado de
serviços, não vinculado a um fornecedor específico, que permitem as
organizações desenvolverem, usarem e manterem aplicações distribuídas através
de redes heterogêneas.
Os
serviços DCE incluem:
·
RPC – Chamada de procedimento remoto, o que facilita a
comunicação cliente-servidor, e então uma aplicação pode efetivamente acessar
recursos distribuídos através da rede.
·
Serviço de Segurança – Autentica a identidade dos
usuários, autoriza o acesso a recursos em redes distribuídas e provê a
contabilização de usuários e servidores.
·
Serviço de Diretórios – Provê um modelo único de nome
através do ambiente distribuído.
·
Serviço de Relógio – Sincroniza os relógios dos
sistemas através da rede.
·
Serviços de Threads – Provê a capacidade de
execução de múltiplas threads.
·
Serviço de Arquivos Distribuídos – Provê acesso a
arquivos através da rede.
Com
relação à segurança, DCE é um dos mais seguros ambientes de computação
distribuída. Incorpora a tecnologia Kerberos, uma forma, altamente confiável,
bem gerenciada e bem entendida de proteger computação em rede.
Interagindo
com a tecnologia hoje existente para internet/intranet a tecnologia para
servidores seguros WEB prevê uma integração com os serviços de nome e serviços
de segurança do DCE. Assim uma
integração do DCE com Secure-http complementando as facilidades de segurança já
existentes com autenticação de usuários para acesso a serviços WEB de
informações restritas.
Com
relação à tecnologia de objetos distribuídos, DCE lidera a interoperabilidade
de diferentes estratégias para objetos distribuídos. DCE permite o uso de objetos distribuídos sem desconsiderar
propostas como CORBA. De fato DCE tem os pré-requisitos das especificações
CORBA como um ambiente específico Inter Orb Protocol que já está disponível,
testado e em uso atualmente. DCE é um componente chave para muitos vendedores
implementarem tecnologias de orientação a objetos. Como exemplo a IBM tem
acordo para suportar os serviços de segurança, nome e relógio do DCE em seu
SOM/DSOM. Hewlett-Packard esta fornecendo DCE++, uma ferramenta orientada a
objeto que provê um compilador C++IDL e biblioteca de classes para DCE. A
Microsoft usa DCE como base para a comunicação com ActiveX. Digital usa a
segurança do DCE em seu ObjectBroker, seu CORBA. Muitos fornecedores têm
expressado a sua intenção em usar DCE RPC como um protocolo específico dentro
da especificação CORBA para prover interoperabilidade.
A programação orientada a objeto é considerada atualmente um dos melhores
modelos de programação para tratar com sistemas complexos enquanto provê
facilidade de manutenção, novas implementações e reusabilidade. Um modelo
contendo estes atributos é particularmente interessante para sistemas
distribuídos, já que estes tendem a se tornar muito complexos. A base da
programação orientada a objeto é o conceito de objeto, que é uma entidade que
encapsula um estado e permite o acesso através de uma interface bem definida.
Programação distribuída orientada a objeto generaliza a programação
orientada a objeto para sistemas distribuídos, estendendo o modelo de objeto
com interação remota cliente/servidor entre objetos não locais. No modelo
cliente/servidor, o servidor provê acesso aos clientes para serviços
específicos através de mecanismos de intercomunicação de processos, IPC, tais
como passagem de mensagens ou chamadas de procedimentos remotos. Na programação
distribuída orientada a objeto um servidor de objetos encapsula um estado
interno e prove o serviço para uma coleção de objetos clientes remotos. Assim
como na pura programação orientada a objeto, este serviço é abstraído através
da interface, ou seja, uma coleção de métodos que podem ser usadas para acessar
o serviço. Clientes que estão residindo em diferentes máquinas podem invocar
estes métodos através da invocação de métodos remotos.
Nos últimos anos tem surgido diversos ambientes de desenvolvimento
baseados no paradigma da programação distribuída orientada a objeto. Estes
ambientes, entre eles os mais notáveis exemplos são CORBA (OMG, 1998), JAVA
Remote Method Invocation (RMI) (SUN, 1998), e DCOM (Distributed
Component Objet Model) (GALLI,1998).
A seguir discutem-se as principais características destes sistemas.
2.4.4.1 CORBA - Common Object Request Broker Architecture
Existe um consórcio internacional de indústrias que promove a teoria e a
prática de programação distribuída orientada a objetos que é chamado de OMG – Object
Management Group (OMG, 1998). Seu objetivo é definir uma arquitetura padrão
e comum para que através de diferentes plataformas de hardware e sistema
operacionais, possa ser feita a intercomunicação entre objetos. O consórcio OMG
foi fundado em 1989 por oito companhias e atualmente conta com cerca de 800
membros, com a participação dos maiores fabricantes de computadores. Esta
organização não desenvolve projetos, trabalha com as tecnologias existentes
oferecidas pelas empresas membros do consorcio.
Figura 11 Modelo de Referencia OMG OMA
Sua forma de trabalho é divulgar RFPs – Request for Proposals em
todos os aspectos da tecnologia de objetos solicitando especificações de novos
componentes. Membros podem então propor uma especificação que é acompanhada
pela implementação provendo o detalhamento dos conceitos inerentes a esta especificação.
Um processo de revisão e votação é conduzido e assim que a especificação é
aceita, qualquer fabricante pode implementar esta alternativa em seu produto
para o mercado.
O consorcio OMG tem desenvolvido um modelo conceitual, conhecido como core
object model, e uma arquitetura de referencia, chamada OMA – Object
Management Architecture sobre a qual as aplicações podem ser construídas. A
OMG OMA se propõem a definir em alto nível de abstração, as muitas facilidades
necessárias para a computação distribuída orienta a objetos. Assim é proposto
um modelo de referencia OMA com cinco
partes principais, representados na Figura
11 (OMG,1998), como segue:
·
ORB – Object Request Broker, (também
comercialmente conhecido como CORBA)
que é um barramento comum de comunicação para os objetos. Permite que
objetos clientes de forma transparente e confiável, requisitem operações em
objetos remotos e recebam respostas em um ambiente distribuído. A integração de
objetos distribuídos está disponível através de plataformas, independente de
sistemas operacionais e serviços de transporte da rede.
·
Serviço de Objetos – são componentes de uso geral
fundamentais para o desenvolvimento de aplicações CORBA. Um serviço de objetos
é basicamente um conjunto de objetos CORBA que podem ser requisitados através
do ORB. Serviços não estão relacionados com nenhuma aplicação especifica mas
são blocos de construção básica, usualmente provida no ambiente CORBA,
suportando funcionalidades básicas úteis para muitas aplicações. Diversos
serviços, tem sido projetados e adotados como standard pela OMG (OMG, 1998), incluindo notificação de
eventos, interfaces de processamento de transação, segurança, controle de
autenticação, etc.
·
Interfaces de Domínio – representam áreas verticais que
provêem funcionalidades de interesse direto para usuários finais em específicos
domínios de aplicação tais como financeiro ou saúde.
·
Facilidades Comuns – provêem ao usuário final funções
úteis em diversas aplicações que podem ser configuradas para uso específico em
aplicações particulares. São facilidades relacionadas com o usuário final, tais
como serviço de impressão, gerenciamentode documentos, e correio eletrônico.
·
Interface de Aplicação – são específicas para
aplicações de usuário final. Representam aplicações baseadas em componentes,
executando tarefas especificas para o usuário. Uma aplicação é tipicamente
composta de um grande número de
objetos, alguns dos quais são específicos da aplicação e outros parte
dos serviços de objetos, facilidades comuns ou interface de domínios.
Todos os serviços OMG devem ser especificados usando OMG – IDL (Interface
Definition Language). Uma linguagem puramente declarativa e não provê
detalhes da implementação. É uma linguagem de programação neutra, independente
de rede e assim usada como uma forma de descrever os tipos de dados. A sintaxe
do OMG IDL é derivada do C++, removendo
os construtores de uma linguagem de implementação e adicionando um número de
novas palavras chaves necessárias para a especificação de sistemas
distribuídos.
Uma definição de CORBA (COULOURIS, 2001), “é um middleware que
permite aos programas de aplicação se comunicarem entre si, independente de
suas linguagens de programação, sua plataforma de hardware e de software e a
rede sobre a qual eles se comunicam”. As aplicações são construídas com objetos
CORBA os quais implementam interfaces definidas na linguagem de definição de
interfaces (IDL). Clientes acessam os métodos nos IDL interfaces dos objetos
CORBA por meio de invocação método remota (RMI). O componente de middleware
que suporta RMI é chamado de distribuidor de requisição de objetos (ORB – Object
Request Broker). A especificação do CORBA foi patrocinada por membros do
grupo OMG – Object Management Group. Muitos diferentes ORBs foram
implementados segundo a especificação, suportando uma variedade de linguagens
de programação. Os serviços CORBA provêem facilidades genéricas que podem ser
usadas em uma grande variedade de aplicações.
JAVA Remote Method Invocation (RMI) é um modelo de objeto
distribuído para a linguagem JAVA que mantém a semântica do modelo de objeto
JAVA, tornando a distribuição de objetos fácil de implementar e de usar
(EMMERICH, 1999). Na terminologia standard
JAVA RMI, um objeto remoto é um cujos métodos podem ser chamados de outra
máquina virtual JAVA. Um objeto deste tipo é descrito por um ou mais interfaces
remotas, que são interfaces JAVA que declaram qual método do objeto remoto pode
ser chamado remotamente. RMI refere-se a ação de invocar um método de uma
interface remota em um objeto remoto.
Figura 12 Arquitetura JAVA RMI
A arquitetura JAVA RMI é ilustrada na Figura
12. Usa o mecanismo padrão (derivado de RPC) para
comunicação com objetos remotos: stubs e skeletons. Um stub
para um objeto remoto atua como um cliente local, representativo para o objeto
remoto. Clientes nunca interagem diretamente com objetos remotos, mas somente com objetos stub os quais são
responsáveis por fazer a chamada em seu remoto objeto destino. Um skeleton
para um objeto remoto é uma entidade no lado do servidor que contém o método
que dispara a chamada para a implementação do atual objeto remoto. Stubs
e skeleton são gerados pelo compilador
RMIC fornecido com a distribuição padrão do JAVA RMI.
Um stub para um objeto remoto implementa o mesmo conjunto de
interfaces remotas implementado pelo objeto remoto. Quando um método do stub
é chamado, ele faz o seguinte:
·
Inicia a conexão com a máquina virtual JAVA remota que
contém o objeto remoto.
·
Escreve e transmite os parâmetros para a máquina
virtual JAVA.
·
Espera pelo resultado destas chamadas.
·
Lê o valor de retorno ou exceção retornada.
·
Retorna o valor a quem chamou.
Na máquina virtual JAVA, cada objeto remoto pode ter um skeleton
correspondente.(na versão JDK 1.2 skeletons não são obrigatórios) O skeleton
é responsável por disparar a chamada para a atual implementação do objeto
remoto. Quando o skeleton recebe uma chamada faz o seguinte:
·
Lê os parâmetros para o método remoto
·
Chama o método na implementação do atual objeto remoto.
·
Transmite o resultado para quem chamou.
A implementação da camada de seção no JAVA RMI suporta a ativação de
objetos sob demanda através da interface de ativação. Assim evita que no JAVA
RMI objetos servidores estejam em memória todo o tempo permitindo que sejam
carregados dinamicamente, quando necessário. A ativação é completamente
transparente e está representada na Figura 13 (EMMERICH, 1999).
Figura 13
Ativação de Objetos Remotos em JAVA RMI
O modelo de objetos componentes distribuídos (Distributed Component
Objet Model – DCOM) é o padrão adotado pela Microsoft para distribuição de
objetos (GALLI, 1998). Estabelece um modelo de programação, padrão binário, bem
como um padrão de interoperabilidade para a computação usando objetos
distribuídos. DCOM está disponível desde o WINDOWS NT 4.0 e tinha versões que poderiam ser obtidas na
internet para o WINDOWS 95. Está incluído no Microsoft Internet Explorer 4.0,
no WINDOWS 98 e disponível para diversas plataformas UNIX fornecido por uma
empresa chamada Software AG. Embora iniciado pela Microsoft, COM e DCOM não é
mais ambiente proprietário da Microsoft. Atualmente o consorcio independente
ActiveX é responsável pelo gerenciamento deste padrão.
O modelo básico COM inclui a habilidade de permitir que elementos lógicos
sejam considerados independentes. Também permite componentes binários flexíveis
para adaptação a diferentes configurações e máquinas. COM é mais largamente
conhecido como a tecnologia básica do ActiveX.
Qualquer ferramenta de software que suporta componentes COM, automaticamente suporta DCOM. Existem quatro
serviços no ambiente do servidor ActiveX que são particularmente úteis para
DCOM: transações, incluindo a capacidade de recuperação e volta ao estado
original; enfileiramento com filas confiáveis de armazenamento e envio que
permitem operações em redes sujeitas a intermitentes falta de acesso; uso de script no servidor para permitir
fácil integração com aplicações de internet baseadas em HTML; e acesso a
sistemas de produção legados. DCOM
permite que a tecnologia COM possa se comunicar diretamente através de redes.
Alguns pontos importantes do DCOM são:
·
Independência de transporte – DCOM permite que os
componentes se comuniquem, seja com ou sem orientação a conexão. Suporta TCP/IP, UDP/IP, IPX/SPX,
Apple Talk e HTTP.
·
Tecnologia aberta – DCOM é uma tecnologia aberta e está
disponível para UNIX, Apple, WINDOWS e alguns ambientes mais antigos. Contudo é
mais comum no ambiente WINDOWS.
·
Integrado com servidor e browser WEB – Como DCOM
inclui ActiveX e os componentes ActiveX podem ser incluídos em aplicações
baseadas em browser DCOM permite distribuir aplicações internet que
suportam tecnologias de browser.
·
Segurança – DCOM pode integrar segurança na internet
baseada em certificados.
·
Extensão do mecanismo RPC do Ambiente de computação
distribuída (DCE) – DCOM usa e estende este mecanismo de RPC do DCE.
A
arquitetura básica DCOM permite que uma aplicação possa ser desenvolvida de
maneira que automaticamente permita uma distribuição futura e com
escalabilidade. Assim se uma demanda maior de uma aplicação acontece podemos
aumentar a capacidade do servidor para atender esta necessidade. Entretanto se
instalarmos um novo servidor e a aplicação estiver no padrão DCOM poderemos
distribuir a execução sendo que parte da aplicação poderá rodar no servidor antigo e parte no novo
servidor. Para se comunicar com um
componente que não seja local, DCOM emprega um mecanismo de comunicação inter
processos que é completamente transparente para a aplicação. Especificamente
DCOM substitui o mecanismo de comunicação local por um protocolo de comunicação
em rede. Desta forma DCOM permite independência e transparência de local para a
aplicação.
Os nomes de instância em DCOM são referenciados como monikers. São
por si só objetos e permitem extrema flexibilidade. Identificadores que vão
desde um nome de banco de dados, um servidor, até um endereço URL ou uma pagina
HTML podem ser caracterizados como uma instância de um objeto. Monikers
contém as informações necessárias e lógicas para localizar uma corrente instância
que está sendo executada do objeto que ele está se referindo. As instâncias que
estão sendo executadas, são listadas na tabela ROT – Running Object Table.
Esta tabela é usada pelo Monikers para encontrar instâncias de objetos
que estão em execução, rapidamente.
Monikers armazenam informações de referencia sobre o estado de um
objeto. Estas informações estão tipicamente armazenadas em um banco de dados.
Um objeto pode indicar para o moniker qual é a atividade quando o estado do
objeto for armazenado. Assim uma operação de acesso a dados pode prevenir um
possível gargalo se o objeto rodar no mesmo servidor onde estão os dados. Se
múltiplos clientes necessitam acessar o objeto, o objeto precisa executar em um
lugar acessível a todos os clientes.
DCOM executa uma chamada a método remoto quando um cliente quer chamar um
objeto em outro espaço de endereçamento.
No DCOM a linguagem de descrição de interface (IDL) foi construída em
cima do padrão DCE RPC. Como é usual em RPC todas as informações parâmetros são
disponibilizadas após serem concatenadas em um único espaço de memória, sendo
passado o endereço desta área. O cliente faz o processo inverso e a partir do
endereço, recria os dados que o processo vai receber. O retorno desta chamada
volta com parâmetros segundo o mesmo processo anterior. O lado do cliente é
conhecido como proxy e o lado do servidor e conhecido como stub. Um tipo adiciona de dados não incluído em
DCE RPC é o ponteiro de interface. Estes tipos de ponteiros podem aparecer como
resultado da CoCreateInstance ou como parâmetro para a chamada de um método.
Para tratar este novo tipo de dado a criação de um par proxy/stub é feita com a capacidade de tratar este
novo tipo de dados em todos os métodos da interface.
O mecanismo primário para controle do tempo de vida de um determinado
objeto é um contador de referencia.
Este contador incrementa quando se usa AddRef e decrementa com o Release. Como
nem todos os clientes terminam normalmente,
um processo de Ping é empregado. Cada objeto exportado tem um tempo de
PingPeriod e um contador de numPingsToTimeOut. A combinação destes valores
determina o tempo total conhecido como período de ping. Se este tempo passa sem
que ocorra um ping para o referido objeto, a referencia remota é
considerada expirada. O contador de referencia é decrementado como se o
processo tivesse terminado normalmente. Quando um objeto não tem referencia
ativa, um processo de coletor de lixo se encarrega de liberar a memória então
ocupada por este objeto.
COM e DCOM operam com a capacidade de multithread nativa do
sistema operacional. Assim a comunicação inter processo no DCOM requer DCE RPC,
que por sua vez requer que mensagens RPC sejam processadas em uma thread
arbitrária. DCOM provê sincronização automática do método de chamada para uma thread
simples. DCOM usa o modelo apartamento com relação ao tratamento de threads.
Com relação aos parâmetros podemos pensar em cada thread como um
processo separado. Acesso na mesma thread é acesso direto enquanto de
diferentes thread é indireto, possivelmente através do proxy/stub. Um
objeto pode suportar qualquer dos modelos de thread que segue:
·
Apartamento Thread única, thread principal
somente – Neste modelo todas as instâncias são criadas na mesma thread
única associada com este objeto.
·
Apartamento Thread única – Neste modelo uma
instância é amarrada a uma thread única contudo diferentes instâncias
podem ser criadas em diferentes threads.
·
Apartamento Multithread – Neste modelo
instâncias podem ser criadas em múltiplas threads e podem ser chamadas
em threads arbitrarias.
Qualquer
objeto implementa como o servidor local controla o tipo de apartamento usado
para seu objeto. Quando um objeto está
sendo criado, COM necessita saber se o objeto é compatível com o modelo de thread
do objeto pai. Se o objeto filho não é compatível, COM tenta carregar o objeto
em um apartamento diferente que seja compatível.
Assim como qualquer sistema que suporta computação distribuída DCOM
também tem seus aspectos de segurança:
·
Segurança de acesso – Assegura que um objeto
possa ser chamado somente por objetos que tenham a permissão apropriada.
·
Segurança no lançamento – Assegura que somente
objetos apropriados possam criar novos objetos em um novo processo.
·
Identidade – O principio de como um objeto
identifica a si mesmo.
·
Políticas de conexão – Se uma mensagem pode ser alterada e se uma mensagem é capas
de ser interceptada por outro objeto.
Segundo Emmerich (1999), quando avalia-se CORBA, JAVA e DCOM encontramos
os seguintes pontos chaves:
·
CORBA, DCOM e JAVA/RMI permitem que objetos clientes
requisitem a execução de operações de objetos servidores distribuídos. Estas
operações são parametrizadas e detalhados mecanismos de passagem de parâmetros
são especificados.
·
CORBA, DCOM e JAVA/RMI todos usam uma forma de
referência para identificar objetos servidores de forma transparente quanto à
localização. Objetos CORBA são identificados por referencia ao objeto, objetos
COM são identificados por ponteiros de interface e objetos JAVA/RMI são
identificados por referencias de falta.
·
JAVA/RMI é diferente de CORBA e DCOM pelo fato que
integra objetos não remotos ao modelo objeto. Isto é obtido modificando o
mecanismo padrão de passagem de parâmetros no modelo e passando objetos não
remotos por valor.
·
O modelo objeto do CORBA, DCOM e JAVA/RMI, todos
separam a noção de interface e implementação. A separação é mais específica em
CORBA e DCOM, onde existem linguagens separadas para definir interfaces e onde
a implementação pode ser escrita em diferentes linguagens de programação.
·
Os modelos de objetos dos três ambientes suportam
herança. Todos especificam uma classe primária que é usada para derivar
propriedades comuns a qualquer objeto referenciado. Esta classe principal é
Object para CORBA, IUnknown im DCOM e Remote in JAVA/RMI.
·
Nos três enfoques, atributos são tratados como
operações. Pode ser implícito como em CORBA ou explicitamente incorporado pelo
projetista usando DCOM ou JAVA/RMI.
·
Todos os modelos de objeto têm suporte para tratar com
falhas durante a requisição de objetos.
·
Todos os modelos de objeto são estaticamente de um tipo
(tipo de variável) e suportam uma forma restrita de polimorfismo. Em todos os
modelos é possível associar um objeto a uma variável de diferente tipo desde
que o tipo da variável estática seja um supertipo do tipo do objeto dinâmico.
·
Em todos os três sistemas de middleware tem-se
geradores para os clientes e stubs no servidor para implementar a camada
de apresentação. CORBA usa stubs no cliente e implementa skeletons. DCOM usa interface proxie
e interface stub. Em JAVA/RMI eles são referenciados como stubs e
skeletons.
·
CORBA, COM e JAVA/RMI todos suportam a ativação sob
demanda de objetos servidores. CORBA
tem esta facilidade através de adaptador de objeto; em DCOM é
implementado pelo gerenciador de controle de serviço; em JAVA/RMI o ativador
implementa esta ativação.
A comunicação em sistemas distribuídos se torna mais complexa, pois a
troca de informações entre dois processos localizados em máquinas distintas
depende primeiramente da interligação destas máquinas. Quando em um único
equipamento dois processos podem se comunicar através da memória compartilhada
que é comum e acessível aos dois processos simultaneamente. Segundo Stallings
(1998), a interligação dos equipamentos hoje pode ter vários enfoques desde o
tratamento de um computador pessoal como um simples terminal até um alto grau
de integração entre aplicações em computadores pessoais e servidores de banco
de dados.
Uma das arquiteturas que se tornou padrão de mercado é o TCP/IP (Transmission
Control Protocol/Internet Protocol), amplamente usado nos dias atuais e que
será visto com mais detalhes na seqüência.
Segundo Stallings (1998), TCP/IP é o resultado de um protocolo pesquisado
e desenvolvido na rede experimental ARPANET, fundada pela DARPA (Defense
Advanced Research Projects Agency) e genericamente conhecido como conjunto
de protocolos TCP/IP. Este conjunto de protocolos foi transformado em padrões
internet pelo IAB (Internet Architecture Board). Não há um modelo oficial de protocolo TCP/IP
como no caso do modelo OSI. Contudo, baseados nos protocolos padrões que foram
desenvolvidos nos podemos organizar as tarefas de comunicação para o TCP/IP em
cinco níveis independentes:
·
Camada de Aplicação – contém a lógica necessária
para suportar as várias aplicações de usuários. Para cada tipo diferente de
aplicação, como exemplo a transferência de arquivos, um módulo separado é
necessário para esta aplicação peculiar.
·
Camada de transporte – Independente da natureza
da aplicação, os dados que estão sendo trocados entre as aplicações precisam
ser confiáveis. O controle da ordenação dos pacotes para garantir que sejam
recebidos na mesma ordem que são transmitidos é uma tarefa que independe da
natureza da aplicação. O protocolo de controle de transmissão (TCP) é o mais
comum nesta camada.
·
Camada de internet – Quando temos a interligação
de diferentes redes é necessário o uso de rotinas que tratam o roteamento para
esta conexão. Os procedimentos para tratar estas funções estão na camada
internet e o protocolo IP é usado nesta camada para prover as funções de
roteamento através de múltiplas redes.
·
Camada de acesso à rede – Esta relacionada com a
troca de dados entre um sistema final e uma rede ao qual está ligada.O
computador que envia precisa prover o endereço da rede de destino. O computador
que envia pode requisitar certos serviços, tal como prioridade, que precisam
ser atendidos pela rede. O software específico usado nesta camada depende do
tipo de rede a ser usado; diferentes padrões foram desenvolvidos para o
chaveamento de circuitos, chaveamento de pacotes (X.25), rede local (Ethernet)
e outros.
·
Camada física – atende a interface de ligação
física entre a estação de transmissão de dados (computador, estação de
trabalho) e o meio de transmissão ou rede. Esta camada está relacionada com
características dos meios de transmissão, a natureza dos sinais, a taxa de
transferência e outros itens relacionados.
Figura 14 Conceito TCP/IP
Em termos de operação, pode-se ver na Figura
14 como estes protocolos são configurados para
comunicação. Para ficar claro que as facilidades de comunicação abrangem
múltiplas redes a rede onde estamos conectados é chamada de subrede. Assim um
protocolo de acesso como o Ethernet é usado para conectar o computador a
subrede. Este protocolo permite enviar dados para outro computador na mesma
subrede ou a um roteador nesta subrede. O protocolo IP está implementado em
todos os sistemas finais e nos roteadores.
Atua como um retransmissor para mover os pacotes da origem ao destino
final passando por roteadores que interligam as subredes. TCP é implementado
somente nos sistemas finais; responsável por controlar os blocos de dados de
forma a que sejam entregues corretamente para as aplicações apropriadas.
Para o sucesso da comunicação, cada entidade no sistema como um todo,
precisa ter um endereço único. Atualmente dois níveis de endereçamento são
necessários. Cada computador em uma subrede precisa ter um endereço global
único o que permite que o dado seja enviado ao computador específico. Este
endereço é usado pelo IP para roteamento e entrega dos pacotes. Em um
computador, cada aplicação precisa ter um endereço único neste computador. Este
endereço único relativo a aplicação, também chamado de porta, permite ao
protocolo TCP fazer a entrega das informações ao processo específico.
Segundo Tanenbaum (1995), uma das
estruturas mais comuns para os sistemas distribuídos é a do cliente-servidor. A
idéia por trás deste modelo é a de estruturar o sistema operacional como um
grupo de processos cooperantes, denominados servidores, que oferecem serviços a
processos usuários, denominados clientes. As máquinas clientes e máquinas
servidoras normalmente rodam o mesmo microkernel, onde tanto os clientes
quanto os servidores rodam como processos usuários. Uma máquina pode rodar um
único processo, vários clientes, vários servidores, ou uma mistura dos dois.
Figura 15 O modelo Cliente Servidor
Para evitar o overhead considerável dos protocolos orientado a
conexão tal como o OSI ou o TCP/IP, o modelo cliente servidor é baseado em um
protocolo muito simples, sem conexão, do tipo solicitação/resposta. A vantagem
deste modelo, (Figura 15) é a simplicidade. O cliente envia uma solicitação ao
servidor e recebe dele uma resposta. Nenhum tipo de conexão deve ser
estabelecido antes do envio da solicitação, nem desfeito após a obtenção da
resposta. A própria mensagem de resposta serve como uma confirmação do
recebimento da solicitação. Devido a esta estrutura extremamente simples, os
serviços de comunicação fornecidos pelo microkernel podem por exemplo,
ser reduzidos a duas chamadas de sistema, uma para envio de mensagens e outra
para a recepção das mesmas.
Figura 16 Ambiente Genérico para Cliente Servidor
Segundo Stallings (1998), um exemplo de ambiente genérico para cliente
servidor é mostrado na Figura
16. A máquina cliente, geralmente um PC ou estação de
trabalho, que tem uma interface muito amigável, geralmente gráfico, para o
usuário final. Cada máquina servidora
disponibiliza um conjunto de serviços compartilhados para os clientes.
A principal característica da
arquitetura cliente/servidor é a alocação de tarefas no nível de aplicação
entre clientes e servidores. A Figura
17 ilustra o caso geral. Em ambas, cliente e servidor, o
software básico é o sistema operacional rodando na plataforma de hardware. A
plataforma e o sistema operacional do cliente pode ser diferente do servidor.
Assim o importante é que um servidor e um particular cliente compartilhem os
mesmos protocolos de comunicação. É o
software de comunicação que permite a interoperabilidade entre o cliente e o
servidor. Exemplos destes softwares incluem TCP/IP e OSI. Um exemplo que bem
ilustra o processamento cliente/servidor é o caso de aplicações que acessam
bancos de dados. Usando linguagem SQL (Structured Query Language) um
aplicativo cliente pode solicitar dados de tabelas contidas em um servidor de
banco de dados. Após processar a requisição o Banco de Dados devolve os
resultados para o cliente que ira tratar as informações e mostrar o resultado
ao usuário, geralmente em um ambiente de telas gráficas, dando uma melhor
apresentação ao resultado final com os dados obtidos.
Figura 17 Arquitetura Genérica Cliente Servidor
RPC (Remote Procedure Calls) é um método comum e largamente aceito
para o encapsulamento de mensagens em um sistema distribuído (STALLINGS, 1998).
A essência desta técnica é permitir que programas em diferentes máquinas possam
interagir usando simples semântica de procedimentos call/return, como se
os dois programas estivessem na mesma máquina. Isto é a chamada de um
procedimento é usada para acessar serviços remotos. A popularidade deste
enfoque é devido as seguintes vantagens:
·
A chamada de um procedimento é amplamente aceita, usada
e de abstração entendida.
·
O uso de chamadas remotas de procedimentos permite que
interfaces remotas sejam designadas como um conjunto de operações nomeadas com
tipos designados. Assim esta interface pode ser claramente documentada e os
programas distribuídos podem ser conferidos estaticamente, em tempo de
compilação, para validar os erros de
tipos (permite conferir os tipos de dados que estão sendo usados nas chamadas,
em tempo de compilação)
·
Devido à especificação de uma interface padronizada e
precisa o código de comunicação para uma aplicação pode ser gerado
automaticamente.
·
Devido à especificação de uma interface padronizada e
precisa o programador pode escrever módulos clientes e módulos servidores que
podem ser usados em diferentes computadores e sistemas operacionais com
pequenas modificações e pouca recodificação.
Figura 18 Mecanismo de Chamada Remota a Procedimento
Na Figura 18 tem-se uma visão detalhada do mecanismo de RPC. O
programa que chama faz uma chamada comum
de procedimentos com parâmetros em sua própria máquina. Por exemplo a
chamada CALL P(X,Y) onde P = Nome do procedimento, X = Parâmetro enviado e Y =
Parâmetro recebido
Isto pode ou não ser
transparente ao usuário que a intenção é chamar um procedimento remoto em outra
máquina. Um pequeno procedimento, chamado de STUB, P deverá ser incluído no procedimento que chama ou ser ligado
dinamicamente na hora da chamada. Este STUB cria uma mensagem que identifica o
procedimento sendo chamado e inclui os parâmetros. Envia a mensagem ao sistema
remoto e aguarda a resposta. Quando uma
resposta é recebida este STUB P retorna ao programa chamador passando os
valores que retornaram.
Na máquina remota, um outro STUB é associado com o procedimento chamado.
Quando uma mensagem chega, ela é examinada e uma chamada local CALL P(X,Y) é
gerada. Este procedimento remoto é assim chamado localmente e tratado como uma
chamada local.
São características básicas que se pode observar no mecanismo RPC:
·
Passagem de parâmetros – Geralmente por valor e não por
referência pois os dados dos parâmetros são copiados dentro da própria mensagem
enviada.
·
Representação dos parâmetros – Quando se tem ambientes
heterogêneos pode-se ter diferença na representação de números e até de texto
(tipos inteiros, tipos float, ASCII/EBCDIC).
·
Forma de ligação – A forma de ligação entre o cliente e
o servidor pode ser de forma persistente e não persistente. Diz-se persistente
quando é estabelecida a comunicação na primeira chamada e esta ligação
permanece após a primeira resposta. De outra forma quando a cada mensagem é
estabelecida uma comunicação, enviada a mensagem, recebida a resposta e
desfeita a comunicação, chamamos de ligação não persistente.
·
Sincronismo – O tradicional é a chamada de
procedimentos de forma síncrona, ou seja o procedimento que chamou, passa a
mensagem e fica aguardando a resposta do procedimento chamado. Para prover
flexibilidade, várias facilidades de chamadas de procedimentos assíncronas
foram implementadas visando um maior grau de paralelismo enquanto mantêm a
simplicidade das chamadas de procedimentos remotos.
Segundo Tanenbaum (1995), o objetivo da chamada remota de procedimentos é
manter escondido do usuário todos os procedimentos relativos à comunicação remota.
Algumas dificuldades se apresentam quando temos a ocorrência de erros no
servidor, no cliente ou na rede gerando situações como segue:
·
O cliente não é capaz de localizar o servidor:
Devido a uma falha de hardware e o servidor efetivamente não estar disponível.
·
Perda de mensagem solicitando serviço: Usando um
contador de tempo, se o tempo expira e a resposta não veio, retransmite a
mensagem.
·
Perda de mensagem com resposta: Uma solução
obvia é um temporizador e se depois de determinado tempo o cliente não obtém a
resposta, faz a requisição novamente. O problema é que nem sempre podemos
simplesmente pedir para repetir a operação. Ocorrem situações onde a requisição
pode ser feita repetidas vezes e teremos sempre o mesmo resultado. Este tipo de
operação é chamado idempotente. Outra situação é se repetimos a
solicitação e os dados são alterados no servidor a cada chamada refeita.
Exemplo, adicionar um valor ao saldo de uma conta corrente. Nesta situação
temos uma operação não idempotente.
·
Quedas do servidor: Este tipo de problema também
está relacionado com a operação idempotente mas não pode ser resolvida com o
uso de números seqüenciais nas mensagens. Num servidor a ordem normal dos
eventos é receber a solicitação, executar o procedimento e responder. Assim uma parada no servidor
pode acontecer após a execução ou antes da execução do procedimento. Existe a
técnica de chamada de no mínimo uma vez, e garante que a chamada remota ao
procedimento será executada no mínimo uma vez. Outro método é chamado de semântica
de no máximo uma vez e garante que a chamada remota foi executada no máximo uma
única vez.
·
Queda do cliente: É a situação quando o cliente
manda uma requisição e antes de receber a resposta, sai do ar.
Na chamada remota a
procedimentos o protocolo empregado é muito importante. Em princípio qualquer
protocolo que permita enviar os bits do cliente para o servidor e vice-versa,
poderia ser usado, porém o aspecto de performance é muito importante e está
diretamente relacionado com o protocolo adotado. Pode-se usar protocolo
orientado a conexão ou protocolo não orientado a conexão, que não necessitam
estarem sempre interligados para a troca de mensagens. Quando se usa um
protocolo orientado a conexão, antes de enviar a primeira mensagem entre dois
procedimentos, é estabelecida uma conexão a qual ficará ativa a partir deste
ponto. Assim facilita muito o processo de retransmissão, pois o tratamento dos
erros será feito pelo protocolo em um nível abaixo e não pela aplicação que
troca mensagens. Em especial em
ligações de longa distância é usado um protocolo orientado a comunicação.
Entretanto para redes locais o nível de erros é muito baixo e o overhead
devido ao uso de um protocolo orientado à conexão é muito alto. Neste caso um
protocolo sem conexão será empregado na maioria das vezes. Outra consideração é se devemos usar um
protocolo padrão, de propósito geral, ou devemos desenvolver um específico para
chamada remota. Alguns sistemas distribuídos usam o IP, ou o UDP que é
construído em cima do IP (TCP/IP), como protocolo básico. A decisão de
implementação a partir de um protocolo padrão como TCP/IP é devido a
facilidades existentes tais como: já estar desenvolvido e testado; padrão em
todos sistemas UNIX; disponível em diferentes sistemas operacionais e adequado
a redes locais e redes remotas.
Com relação à performance, o IP não foi projetado para ser um protocolo
para usuário final. Seu projeto baseia-se no fato de que é possível estabelecer
conexões TCP confiáveis entre redes.
Outro aspecto muito importante a ser considerado é o fluxo de controle.
Muitos chips de interface de rede são capazes de enviar pacotes
consecutivamente sem quase nenhum intervalo entre eles, más estes mesmos chips
normalmente não têm como receber um número ilimitado de pacotes, devido à sua
capacidade de armazenamento ser finita.
Com relação a confirmações de mensagens tem-se a situação do servidor
eventualmente perder a confirmação de uma mensagem. Na chamada remota de
procedimentos o protocolo consiste em uma requisição, uma resposta e uma confirmação. Esta última é
necessária para fazer com que o servidor possa desfazer-se das respostas que
tenham sido recebidas corretamente pelo receptor. Na prática o servidor pode
inicializar um temporizador ao enviar a resposta e livrar-se dela quando este
temporizador expirar. Outra forma é interpretar uma nova requisição do cliente,
como sendo também uma confirmação da requisição anterior, pois se a anterior
não fosse recebida, não estaria fazendo uma nova requisição.
Alguns aspectos sobre gerência de tempo devem ser considerados na chamada
remota de procedimentos. Todos os protocolos são desenvolvidos para permitir a
troca de mensagens sobre algum tipo de meio de comunicação. Em todos os
sistemas, algumas mensagens podem ser ocasionalmente perdidas, devido ao ruído
na comunicação ou ao overflow no buffer de recepção. Em
conseqüência, a maioria dos protocolos inicializa um temporizador sempre que
uma mensagem é expedida e uma resposta é esperada. Se a resposta não chegar em
determinado tempo, o temporizador sinaliza, e a mensagem original é
retransmitida.
Figura 19 Servidor de Requisição de Objetos
Em um nível superior a chamada de procedimentos remotos, encontramos o
mecanismo de comunicação de objetos.
Nos mecanismos de comunicação com orientação a objetos podemos ter
simples mensagens ou objetos completos
sendo trocados entre os processos que se comunicam. Segundo Stallings (1998),
um cliente que necessita um serviço envia uma requisição para um provedor de
requisição de objetos que atua como um diretório de todos os serviços remotos
disponíveis na rede, Figura 19. Uma
padronização neste mecanismo de troca de objetos ainda não ocorreu. Encontra-se
concorrentes como Microsoft com COM/OLE (Common Object Model / Object
Linking and Embedding) e outros como IBM. Apple, Sun que adotaram CORBA (Common Object
Request Broker Architecture).
Destaca-se neste capítulo o embasamento conceitual relativo ao tema
principal deste trabalho que é a Comunicação em Grupo. Todas as características
deste paradigma usado em sistemas distribuídos se encontram conceituadas neste
capitulo.
Em sistemas distribuídos é fundamental a comunicação entre os diversos
computadores que compõem este ambiente de sistemas distribuídos. Como já se
viu anteriormente a Chamada Remota de
Procedimentos – RPC se aplica em especial para a comunicação que envolve dois
processos. Em algumas situações é desejável que um processo possa se comunicar
com diversos outros processos. Com RPC não se pode ter um único transmissor que
envia de uma única vez para múltiplos receptores. Este mecanismo de comunicação
que trata múltiplas conexões é chamado de Comunicação em Grupo e segundo
Tanenbaum (1995), tem as peculiaridades e características que serão
apresentadas neste capítulo. Um grupo é uma coleção de processos que
interagem entre si em algum sistema. A
propriedade chave que todos os grupos tem é que quando uma mensagem é enviada
para o grupo, todos os membros do grupo recebem esta mensagem. Esta forma é
chamada Comunicação Um-Para-Muitos, um transmissor para muitos receptores, em
contraste com a Comunicação Ponto-a-Ponto, conforme ilustrado na Figura 20.
Figura 20 (a) Comunicação Ponto-a-Ponto (b)
Comunicação Um-Para-Muitos
Grupos são dinâmicos e assim novos grupos podem ser criados e grupos
antigos podem ser destruídos. Um processo pode juntar-se a um grupo ou deixar
um grupo. Um processo pode ser membro de diversos grupos ao mesmo tempo. Assim
mecanismos são necessários para gerenciar grupos e os processos participantes
dos grupos. Quando usamos mecanismos de
comunicação em grupo os processos tratam com coleções de outros processos de
forma abstrata. Se um processo envia uma mensagem para um grupo de servidores,
este processo não precisa se preocupar quantos são os servidores nem onde eles
estão localizados. Inclusive já na chamada seguinte o número de servidores
deste grupo e suas localizações podem mudar sendo esta alteração transparente
para o processo que envia a mensagem para o grupo.
Como será implementada a comunicação em grupo, depende das
características do hardware usado na interligação dos equipamentos. Em algumas redes é possível se criar um
endereço especial de rede onde múltiplas máquinas podem escutar neste endereço.
Quando um pacote é enviado para um destes endereços, automaticamente ele é
recebido por todas as máquinas que estão escutando este endereço. Esta técnica
é chamada de “multicasting”. Implementar comunicação de grupos usando “multicasting”
é simples, basta atribuirmos um
endereço de “multicasting” para cada grupo. Em redes que não temos o “multicasting”,
ainda podemos ter o “broadcasting”, onde os pacotes que tem um determinado
endereço são escutados por todas as máquinas. O “broadcasting” pode ser
usado para implementar comunicação em grupo, embora não seja tão eficiente,
pois todos na rede vão receber as mensagens e cada processo terá que avaliar se
aquela mensagem recebida é para o grupo ao qual ele pertence. Se não for vai
descartar a mensagem mas neste caso o processo já gastou tempo e recursos.
Mesmo assim ainda tem a vantagem que um único pacote enviado vai atingir a
todos os equipamentos da rede. Se a rede não suporta “multicasting” nem
“broadcasting” ainda é possível se implementar um sistema onde o
transmissor vai enviar um pacote separado para cada um dos receptores do grupo.
Para um grupo com N membros é necessário o envio de N pacotes ao invés de um
único pacote como no “broadcasting” ou “multicasting”. Quando a
comunicação é um a um é chamada de “unicasting”. Além das
características normais encontradas nos mecanismos de troca de mensagens, tais
como, buferização, blocagem, no tratamento de grupos temos novas características
de organização, endereçamento e outras que serão detalhadas na seqüência.
Os sistemas que suportam comunicação em grupo podem ser divididos em duas
categorias, dependendo que quem está enviando para quem. Alguns sistemas
suportam o conceito de grupo fechado, no qual somente membros do grupo podem
enviar mensagens para o grupo. Membros de fora do grupo não podem enviar
mensagens para o grupo como um todo, embora possam enviar mensagens para
membros individuais. Outro conceito,
grupo aberto, onde qualquer processo pode enviar mensagem para qualquer grupo.
Na Figura 21 (TANENBAUM ,1995), apresenta-se uma ilustração de
grupo aberto e grupo fechado.
Figura 21 (a) Grupo Fechado (b) Grupo Aberto
A decisão de usar grupo fechado ou grupo aberto, normalmente está
relacionada com o tipo de aplicação que estará sendo executada, usando estes
mecanismos de comunicação em grupo. Se for uma aplicação típica de
processamento paralelo, uma coleção de processos trabalhando juntos para a
solução de um problema, neste caso não interessa outro processo de fora
interagir com algum processo do grupo, sendo típico para um grupo fechado. De
outro lado, em uma aplicação de servidores replicados, um processo não membro
do grupo, um cliente, pode enviar uma mensagem para o grupo fazendo alguma
requisição aos servidores.
Ainda quanto à organização temos grupos de semelhantes e grupos
hierárquicos. Esta característica está relacionada à estrutura interna do
grupo. Em alguns grupos os processos são iguais. Nenhum processo é gerente e
todas as decisões são feitas coletivamente. Em outros grupos existe um processo
que é o coordenador e os demais fazem o que é determinado por este coordenador.
Neste caso quando uma requisição é feita, seja por um cliente externo ou por um
dos membros do grupo, a requisição é enviada ao coordenador. O coordenador
decide qual dos processos do grupo é o mais indicado para executar esta
solicitação. Este padrão de comunicação está ilustrado na Figura 22 (TANENBAUM ,1995).
Figura 22 (a) Comunicação em Grupo de Semelhantes
(b) Comunicação em
Grupo Hierárquico.
Cada uma destas organizações tem suas próprias vantagens e desvantagens.
Na comunicação em grupos de semelhantes não tem um ponto único de falha. Se um
dos processos falhar, o grupo continua, apenas se torna menor. A desvantagem é
que a tomada de decisão é mais complicada. Para alguma decisão, tem que
envolver todos do grupo, gerando uma
demora e um overhead. No grupo hierárquico temos o oposto sendo as
decisões tomadas pelo coordenador. Qual processo do grupo vai executar qual
atividade e quando um processo termina, ele avisa ao coordenador que está
pronto para outra atividade. A perda do coordenador em um grupo hierárquico
causa uma parada nas atividades do grupo.
No mecanismo de comunicação em grupo é necessário um controle sobre a
criação e destruição de grupos, bem como permitir que processos se integrem ao
grupo ou deixem o grupo. Um enfoque é ter um servidor de grupo para o qual
todas as requisições possam ser feitas. Este servidor de grupo pode manter um
controle total de todos os seus grupos e quais participantes de grupo pertencem
a qual grupo. Este método é fácil de entender, eficiente e de fácil
implementação. Infelizmente ele compartilha com a maior desvantagem das
técnicas centralizadas, um único ponto de falha. Se o servidor de grupos falhar, o gerenciamento do grupo deixa de
existir. Provavelmente a maioria dos grupos terá que ser reconstruídos, e
certamente interrompendo o trabalho que estava em andamento.
O enfoque oposto é gerenciar os grupos de uma forma distribuída. Em um
grupo aberto, um processo de fora do grupo, pode enviar uma mensagem para todos
do grupo anunciando a sua presença. Em
um grupo fechado, ao menos com relação à solicitação de participar do grupo,
também será enviada uma mensagem para todos. Este grupo fechado, só aceita uma
mensagem de algum processo fora do grupo, quando esta mensagem é de solicitação
para participar do grupo. Uma mensagem direta sem antes estar participando do
grupo fechado, não seria aceita. Para um processo deixar de fazer parte de um
grupo, basta enviar uma mensagem de adeus a todos do grupo.
Consideram-se ainda duas características relativas ao controle dos
participantes do grupo. Se o membro do grupo falhar ele efetivamente deixa de
pertencer ao grupo. O problema é que pode não existir um aviso a todos os outros
membros do grupo, como quando o processo deixa o grupo de forma padrão. Os
demais membros têm que descobrir por conta própria que aquele participante não
está respondendo e o excluir do grupo. Outro ponto é o sincronismo necessário
entre as mensagens sendo enviadas e a entrada ou saída de um membro no grupo.
Todo processo que for integrado ao grupo no momento t deverá receber a partir
deste momento t, todas as mensagens enviadas. Da mesma forma quando deixa o grupo no momento z, todas as
mensagens enviadas após z já não são mais endereçadas a este processo que
deixou o grupo. Uma forma de resolver
esta situação é transformar a operação de inclusão no grupo ou retirada do
grupo em uma mensagem especial de inclusão ou retirada que será transmitida de
forma síncrona na seqüência das demais mensagens para o grupo. Uma última
preocupação relacionada a controle dos participantes do grupo é quando muitas
máquinas param de forma anormal, por exemplo quando ocorre um particionamento
da rede, deixando o grupo inoperante. Algum protocolo é necessário para
reconstruir o grupo com as máquinas que restaram.
Para que um processo envie uma mensagem a um grupo é necessária uma forma
de identificar o grupo. Uma forma é atribuindo a cada grupo um endereço único
assim como temos um número único de identificação para cada processo. Se a rede suportar multicast, o
endereço do grupo pode ser associado com o endereço de multicast, assim
cada mensagem enviada ao grupo pode ser direcionada especificamente para aquele
grupo identificado pelo endereço de multicast e só vai ser recebida
pelas máquinas que fazem parte daquele endereço de multicast. Se o
hardware não suporta multicast mas aceita broadcast, as mensagens
podem ser enviadas por broadcast. Cada kernel receberá a mensagem
e vai avaliar o endereço do grupo. Se algum processo que está rodando nesta
máquina faz parte do grupo ele recebe a mensagem, caso contrário, a mensagem
será descartada. Em ultimo caso se nem multicast nem broadcast for suportado na rede, o kernel na máquina
que envia deverá ter uma lista de todas as máquinas que tem processos
pertencentes a este grupo da mensagem a ser enviada. O kernel então
envia em uma conexão ponto-a-ponto a cada um dos participantes do grupo uma de
cada vez, a mensagem a ser transmitida. Estas três implementações são vistas na
Figura 23 onde um processo 0 envia uma mensagem para um grupo
consistindo dos processos 1, 3 e 4.. Um ponto importante é que mesmo nos três
casos o processo que envia manda apenas uma mensagem para o endereço do grupo e
a mensagem vai para todos os membros do grupo. A forma como será transmitida é
problema do sistema operacional. O processo que envia não tem que se preocupar
com o tamanho do grupo ou se a comunicação vai ser por multicasting , broadcasting ou unicasting
.
Figura 23 (a) Multicasting (b) Broadcasting (c) Unicasting
Um segundo método de endereçamento do grupo é quando o processo do
usuário final que envia tem uma lista explicita de todos os destinos, por
exemplo, endereços IP. Quando este método é usado, um parâmetro na chamada de
envio da mensagem é um ponteiro para uma lista de endereços. Este método tem um
sério inconveniente que é forçar o processo membro do grupo de saber precisamente
quem faz parte do grupo. Assim deixa de ser transparente. Sempre que existir
uma mudança de participante no grupo o processo do usuário final precisa
atualizar sua lista de membros do grupo. No exemplo da Figura 23 esta administração é feita pelo kernel e o
processo do usuário final não se preocupa com isto. Um terceiro método de
endereçamento é chamado de endereçamento com predicado. Neste sistema cada
mensagem é enviada para todos os membros do grupo porém contendo um predicado,
uma expressão booleana, para ser avaliada. Este predicado pode envolver o
número da máquina receptora, suas variáveis locai ou outros fatores. Se este
predicado após ser avaliado for verdade então a mensagem é aceita.
Seria ideal se fosse possível ter um conjunto de primitivas comuns, tanto
para comunicação ponto-a-ponto como para comunicação em grupo. Quando usa-se
RPC tem-se o envio e a recepção de mensagens usando duas simples primitivas
tais como “send” e “receive”, respectivamente. Para a comunicação em grupo uma
mensagem enviada pode gerar diversas respostas. Se for possivel usar uma
biblioteca de procedimentos poderemos ter uma semântica única para envio de
mensagens, com dois parâmetros. Se fosse RPC um parâmetro era endereço do
processo e o segundo endereço da mensagem. Se for para grupo o primeiro
parâmetro é o endereço do grupo e segundo endereço da mensagem. A chamada pode
ser usando buffer ou não, bloqueada ou
não, confiável ou não tanto para ponto-a-ponto como para grupo. Em geral estas escolhas são feitas pelos
projetistas do sistema e ficam sem flexibilidade de parametrização. De maneira similar o “receive” indica a
intenção de receber uma mensagem, podendo o processo ficar bloqueado até o
recebimento da mensagem. Se usarmos a mesma semântica o “receive” deveria
funcionar para comunicação ponto-a-ponto e para grupos. Devido a estas
dificuldades para manter a mesma semântica com formas tão diferentes de
processamento, alguns projetistas incluíram novas primitivas como “group_send”
e “group_receive”. Se necessário associar a resposta a uma chamada podemos usar
“getreply” onde após o envio de uma mensagem podemos chamar “getreplay”
repetidamente para coletar todas as respostas associadas.
Uma propriedade importante no mecanismo de comunicação em grupo, é a
propriedade do tudo-ou-nada. A maioria dos sistemas que implementam os
mecanismos de comunicação em grupo, são projetados para que as mensagens
enviadas a um grupo cheguem
corretamente a todos os membros deste grupo ou não cheguem a nenhum deles. Esta
propriedade do tudo-ou-nada é também conhecida como atomicidade ou broadcast
atômico. A atomicidade é importante pois torna mais fácil a programação de um
sistema distribuído. Quando qualquer processo enviar uma mensagem para um grupo
ele não deve preocupar-se se algum outro membro do grupo não recebeu esta
mensagem. Com esta propriedade da atomicidade o processo que envia a mensagem
para um grupo irá receber uma mensagem de erro se um ou mais integrantes do
grupo teve problema no recebimento sendo que os demais vão ignorar esta
mensagem. Do ponto de vista de programação, tudo se passa como se fosse enviado
para apenas um receptor.
Outra propriedade importante é o ordenamento das mensagens. Além do conceito
tradicional de envio e recebimento de mensagens, quando tratamos de comunicação
em grupo devemos ter em mente o conceito de entrega da mensagem. Assim uma
mensagem recebida para um destino final passa por um processo de entrega que
eventualmente precisa ser controlado para que a seqüência de entrega seja a
mesma seqüência de envio. Alguns algoritmos que tratam estas características de
ordenamento em ambiente de multicast podem ser encontrados em Coulouris,
2001 no capítulo 11.
Figura 24
Diretório de Mensagens dos Usuários U3 e U4
Para exemplificar esta propriedade de ordenamento de mensagens,
considera-se uma situação que ocorre em um grupo de assinantes de uma lista de
discussão na Internet. Uma lista de
assinantes pode ser considerada como um grupo onde todos os membros do grupo
estão interessados no assunto que é tratado na lista. Assim quando alguém envia
uma mensagem para o grupo todos recebem esta mensagem e alguns podem responder
a referida mensagem, resposta esta que também será propagada para todos os
membros do grupo. Observa-se o diretório de mensagens recebidas de dois
usuários deste grupo, usuário U3 e usuário U4, conforme Figura 24. O usuário U3
recebe uma mensagem com o assunto “novo modelo?” enviada por U1 e logo em
seguida uma outra mensagem “Re: novo modelo?” enviada por U2 onde uma resposta
para a pergunta anterior estava sendo fornecida. Se observarmos o diretório de mensagens do usuário U4 veremos que
este primeiro recebeu a resposta “Re: novo modelo?” , uma outra mensagem
enviada por U5 e depois é que recebeu a pergunta “novo modelo?” caracterizando
uma troca de ordem nas mensagens recebidas.
Esta troca ocorreu pois o servidor de mensagens trabalha de forma
assíncrona e a entrega das mensagens não tem nenhuma garantia de ordenamento.
Certamente a mensagem enviada por U1 com a pergunta “novo modelo?” não pode ser
entregue na primeira tentativa e quando foi reenviada posteriormente para o
usuário U4 este já tinha recebido antes a resposta da pergunta.
Um mecanismo de comunicação em grupo precisa ter uma semântica bem
definida com relação à ordem em que as mensagens serão entregues. A melhor
garantia para isto é fazer com que as mensagens sejam entregues na mesma ordem
em que foram enviadas. Neste exemplo de lista de mensagens anterior esta
garantia não é implementada pois o custo seria muito grande e os sistemas de
lista se valem dos recursos já existentes de envio de mensagens via Internet e que não contemplam ordenamento.
A
ordenação de mensagens é um ponto muito importante na comunicação em grupo e
assim vamos detalhar mais este assunto baseado nos conceitos de ordenação de
mensagens em serviços de broadcast (BROADCAST, 1997), (ATTIYA,
1998), (MULLENDER, 1993), e também no sistema AMOEBA (KAASHOEK, 1993).
Existem quatro tipos diferentes de ordenação que normalmente estão
implementadas nos mecanismos de comunicação de grupo:
·
Sem Ordem – Onde as mensagens são enviadas ao
grupo sem a preocupação de ordenamento. Tem o menor overhead pois não
necessita controle algum de seqüência porém pode não ser adequado para muitas
aplicações.
·
Ordenamento FIFO – Garante que todas as
mensagens de um membro sejam entregues aos demais membros do grupo na ordem em
que elas foram enviadas. Para todas as mensagens M1 e M2 e todos os processos
Pi e Pj, se Pi envia M1 antes de enviar M2, então M2 não é recebida em Pj antes
que M1 seja recebida.
·
Ordenamento CAUSAL – No ordenamento causal
introduz-se o conceito de mensagem dependente de outra. Um exemplo para
ilustrar, é quando se recebem mensagens de uma lista na Internet. Um membro da
lista envia uma pergunta para a lista, esta mensagem é enviada a todos os
membros da lista. Na seqüência alguém responde a solicitação e esta resposta
também é enviada a todos. Na caixa postal de um participante da lista chega
primeiro a mensagem com a resposta e mais tarde a mensagem com a pergunta. No
ordenamento causal as mensagens estão em ordenamento FIFO e se um membro após
receber a mensagem A envia uma mensagem B, é garantido a todos os membros do
grupo que vão receber A antes de B. Para todas as mensagens M1 e M2 e cada
processo Pi, se M1 acontece antes de M2 então M2 não é recebida em Pi antes que
M1 seja. A Figura 25 apresenta um exemplo gráfico de ordenamento causal.
Nesta execução duas mensagens são controladas em termos de entrega. Primeiro a
mensagem de p1 (0,2,0) é atrasada até que a mensagem anterior (0,1,0) chegue
vinda de p1. Depois a mensagem (1,3,0) vinda de p0 é atrasada até que a mensagem
(0,3,0) vinda de p1 (que aconteceu antes) tenha chegado.
Figura
25
Ordenamento Causal
·
Ordenamento Total – No ordenamento total cada
membro do grupo recebe todas as mensagens na mesma ordem. Para todas as
mensagens M1 e M2 e todos os processos Pi e Pj, se M1 é recebida em Pi antes
que M2 seja, então M2 não é recebida em
Pj antes que M1 seja. Este ordenamento total é o melhor de todos aqui
apresentados e torna a programação fácil, mas é difícil de ser implementado.
Uma propriedade de
sobreposição de Grupos está associada ao fato que um processo pode ser membro
de diversos grupos ao mesmo tempo. Esta
situação pode levar a que se tenham
inconsistências. Pode-se observar na Figura
26 que mostra dois grupos 1 e 2. Os processo A, B e C
são membros do grupo 1. Os processo B,C e D são membros do grupo 2. Supondo que os processos A e D decidam
simultaneamente enviar uma mensagem a seus respectivos grupos, e que o sistema
use a ordenação em tempo global dentro de cada grupo. Considerando que se usa unicast,
a ordem das mensagens é mostrada na Figura
26 (TANENBAUM ,1995), através da numeração de 1 a 4.
Novamente temos uma situação em que dois processos B e C, recebem mensagens em
ordem diferente. O processo B primeiro
recebe uma mensagem de A, seguida por uma vinda de D. O processo C recebe na
ordem oposta. O problema é que embora tenhamos ordenação em tempo global,
dentro do grupo, não há necessariamente qualquer coordenação entre os diversos
grupos. Alguns sistemas suportam uma
ordenação no tempo muito bem definida entre grupos sobrepostos, mas outros não.
Figura 26 Quatro Processos A,B,C e D e Quatro
Mensagens.
Os processos B e C recebem as mensagens de A e
D em ordem diferente
Outra
propriedade importante nos mecanismos de comunicação em grupo se refere a
escalabilidade. Muitos algoritmos funcionam bem enquanto os grupos possuem
poucos elementos e não houver muitos grupos.
Podem-se ter problemas se o grupo tiver centenas ou milhares de
componentes, ou se tivermos milhares de grupos e se o sistema for muito grande.
Existem atualmente diversos mecanismos de comunicação em grupo sendo que
alguns foram desenvolvidos no início da
década de 90 e outros mais recentes inclusive usando tecnologia de orientação a
objetos.
Um ponto importante a ser considerado com relação à rede onde vai rodar o
mecanismo de comunicação em grupo é a possibilidade de particionamento da rede.
Podemos ter redes locais independentes, redes locais interligadas via WAN ou
grandes redes interligadas formando uma grande WAN. A seguir apresentamos
resumidamente alguns mecanismos de comunicação em grupo conforme sua
classificação.
Uma partição é onde a comunicação em grupo ocorre somente entre os
membros desta rede. Mecanismos de comunicação de grupo que são voltados
exclusivamente para partições únicas são também chamados de mecanismos de
partição primária. Alguns mecanismos que não aceitam o particionamento são
voltados especificamente para redes locais onde as características de
confiabilidade, latência, taxa de erro permitem a adoção de algoritmos
simplificados e conseqüentemente com melhor performance do que aqueles que
aceitam particionamento. A seguir alguns exemplos de mecanismos de partição
primária.
ISIS
O ISIS (BIRMAN, 1994), é composto de uma serie de ferramentas na forma de
uma biblioteca de procedimentos ligados diretamente à aplicação. Desenvolvido na
Universidade de Cornell no ano de 1985 pelo professor Birman, (2002), provê
funcionalidades para a criação dinâmica de grupos de processos, participar de
um grupo, e mandar mensagens aos processos do grupo com várias garantias de
ordenamento. O sincronismo das mensagens, FIFO, ordenamento causal e
ordenamento total são permitidos com primitivas de multicast. Este conjunto de software suporta
sincronismo virtual e tolerância a falha. Este trabalho foi descontinuado e em
seu lugar o autor passou a pesquisar um novo sistema chamado de HORUS (RENESSE, 1996).
PHOENIX
PHOENIX (MALLOTH, 1996),
foi desenvolvido no Swiss Federal Institute of Technology em Lausanne. É
um kit de ferramentas de comunicação de grupo que trabalha com membros de grupo
em partição primária e sincronismo de mensagens de uma única visão em ambientes
assincronos. PHOENIX implementa roteamento dinâmico, canais de comunicação
confiáveis com orientação a datagrama, primitivas de comunicação de grupo e
ordenação de mensagens. Suporta um alto número de processos designando a eles
diferentes regras: membros principais, clientes e receptores. Membros
principais gerenciam estados compartilhados e tem forte garantia de
confiabilidade com respeito à entrega de mensagens e alterações nos membros do grupo.
Comunicam-se uns com os outros usando grupo multicast. Clientes
interagem com membros principais enviando requisições para eles e recebendo
respostas e alterações nos participantes do grupo. Finalmente os receptores
somente recebem informações difundidas pelos membros do grupo. A interface de
programação PHOENIX prove a abstração de orientação a objeto para suportar
grupos de objetos ao invés de grupos de processos.
RMP
O protocolo multicast confiável (RMP – Reliable Multicast
Protocol) (WHETTEN, 1994), provê serviços de multicast atômico,
confiável e totalmente ordenado a partir de serviços de datagrama multicast
não confiáveis tais como o IP multicasting. RMP provê muitas opções de
comunicação, incluindo sincronismo virtual, um modelo publicante/assinante de
entrega de mensagens, um modelo cliente/servidor, um serviço de nomes
implícito, manuseadores mutuamente exclusivo
para mensagens e mutuamente exclusivos controles de lock. RMP é
baseado em técnicas de token RING. Este protocolo prove broadcast
atômico totalmente ordenado para um grupo único de clientes em uma LAN.
Alguns mecanismos de comunicação em grupo são chamados de particionáveis
pois podem tratar possíveis particionamentos que possam ocorrer na rede. Uma
partição é onde a comunicação em grupo ocorre somente entre os membros desta
rede. Assim um mecanismo que trata
particionamento, pode controlar um grupo formado por duas LANs interligadas e caso ocorra uma queda no
link, ira separar os processos em dois grupos e posteriormente quando
restabelecer o link fará uma intercalação dos dois grupos, voltando ao
status do grupo original. A seguir apresenta-se resumidamente alguns mecanismos
de comunicação em grupo do tipo particionavel.
TOTEM
TOTEM (MOSER, 1996), foi desenvolvido na Universidade da Califórnia em
Santa Bárbara e é um conjunto de protocolos de comunicação para a construção de
sistemas distribuídos tolerantes a falha. TOTEM é voltado para aplicações
complexas nas quais confiabilidade e performance em tempo real são críticas. O
sistema TOTEM manuseia falhas e recuperação de processos, particionamento de
rede e reagrupamento de redes partidas. Mesmo que ocorra um particionamento de
rede as operações continuam em cada parte da rede. Além disso, TOTEM fornece
diversas primitivas de multicast com ordenação para os grupos de
processos, com alta performance e baixa latência prevista. Este protocolo
explora as capacidades de multicast existentes no hardware em redes LAN
e a localização dos grupos de processos de forma a prover garantias de tempo
real ao software.
HORUS
O projeto HORUS (RENESSE, 1996), foi originalmente lançado com um esforço
de redesenhar a série de ferramentas ISIS em um conjunto de pequenas, unidades
modulares bem definidas. HORUS provê um modelo de sincronismo virtual que
permite que uma aplicação faça progresso mesmo em uma partição minoritária,
indicando para a aplicação se ela no momento é parte da partição primaria ou
não. Uma das mais interessantes características do HORUS reside na sua
arquitetura de comunicação que trata o protocolo como um tipo de dados
abstrato. Camadas de protocolo podem ser empilhadas no topo de cada uma delas
em uma variedade de formas em tempo de execução. HORUS provê um ambiente de
composição de protocolo que permite protocolos personalizados possam ser
compostos a partir de outros existentes. Esta arquitetura tem a vantagem
adicional que uma aplicação somente paga propriedades que usa.
ENSEMBLE
Recentemente uma nova geração do sistema HORUS tem aparecido e se chama
ENSEMBLE (HAYDEN, 1998). ENSEMBLE é uma arquitetura de protocolo de alta
performance que permite reconfiguração de redes e voltada para aplicações
adaptativas. A funcionalidade básica do ENSEMBLE é controlar os participantes
do grupo e prover suporte de comunicação entre os membros do grupo e
comunicação que vem de outros não membros do grupo. Dependendo da natureza da
aplicação o usuário pode trabalhar com ENSEMBLE diretamente, como uma
ferramenta suportando replicação de dados, colaboração, ou coordenação. Contudo
ENSEMBLE pode também ser usado para controlar outras tecnologias, tais como o
resultado final de comunicação padrão sockets em camadas sobre IP.
TRANSIS
O sistema de comunicação TRANSIS (DOLEV, 1996), desenvolvido na
Universidade Hebrew de Jerusalém, suporta o processamento de grupos de
comunicação com diversas formas de operação de multicast em grupo.
Ordenação FIFO, ordenação causal,
ordenação total e entrega segura. TRANSIS tem um protocolo para entrega
de mensagens confiáveis que otimiza a performance para o hardware existente na
rede e também aceita particionamento de rede. Recentemente o grupo do TRANSIS
tem desenvolvido protocolos para escalar gerenciamento de membros do grupo em
redes WAN.
NEWTOP
É um protocolo de comunicação em grupo de propósito geral (EZHILCHELVAN,
1995). Assume que processos podem pertencer a diversos grupos simultaneamente,
o tamanho do grupo pode ser grande e os processos podem estar geograficamente
espalhados e distantes comunicando-se pela internet. Em ambiente de comunicação
assíncrona é onde temos dificuldade de medir de forma precisa o tempo de
transmissão das mensagens, e a rede envolvida pode ser particionada,
impossibilitando que todos os processos possam se comunicar entre si. NEWTOP
pode prover ordenação causal e ordenação total na entrega das mensagens aos
membros de um grupo e também assegurando que a ordenação total é preservada
para processos em multi grupo. Tanto protocolo de ordenamento simétrico como
assimétrico são suportados, permitindo que um processo possa ter versão
simétrica em um grupo e versão assimétrica em outro grupo. NEWTOP é dinâmico e
tolerante a falha: ordenamento e controle de vida são preservados mesmo se mudanças nos membros do grupo ocorrem
devido às falhas em processos, saída voluntária de processos ou formação de
novos grupos.
ATOMIC
O sistema ATOMIC (KOCH, 2000), é um sistema de comunicação em grupo que
foi projetado para redes do tipo ATM. O protocolo usado neste sistema cria sua
própria topologia para a distribuição dos dados. Os processos são organizados
em grupos locais onde inicialmente é feita a ordenação do grupo. A ordenação
através de outros grupos ocorre quando processos passam a pertencer a mais de
um grupo.
Sendo altamente escalar, ATOMIC permite milhares de nós distribuídos
sobre uma área fisicamente grande, formando um sistema único, que contém um grande número de
processos. O protocolo foi projetado para prover alto desempenho e baixa
latência na entrega das mensagens. Baseado em controles de tempo (timestamps) derivados de relógios físicos ou lógicos.
O sistema de comunicação em grupo ATOMIC, se vale de um protocolo multicast
confiável baseado em números de seqüência para conseguir entregar as mensagens
de forma confiável e controles de tempo para obter ordenamento total. O
protocolo é iniciado pelo receptor, o que prove uma situação de latência muito
baixa no caso de perda de mensagens.
Considerando os produtos acima descritos pode-se classificar os mesmos
segundo a sua orientação para uso em LAN ou WAN, conforme Quadro 3.
Quadro
3 Mecanismos de Comunicação em Grupo e
Ambientes de Rede
|
LAN
|
WAN
|
|
ISIS
|
TOTEM
|
|
PHOENIX
|
HORUS
|
|
RMP
|
ENSEMBLE
|
|
|
TRANSIS
|
|
|
NEWTOP
|
|
|
ATOMIC
|
Neste trabalho três mecanismos foram selecionados para um estudo mais
aprofundado sendo dois especificamente em ambiente JAVA, INTERGROUP (BERKET,
2000), e JGROUP (MONTRESOR, 2000), e o
terceiro fortemente baseado em ambiente UNIX, porém com versões para outras
plataformas, o SPREAD (AMIR, 1998). A
razão da escolha destes três mecanismos refere-se ao fato de todos terem uma
documentação mais detalhada para análise e facilidade na obtenção do software
correspondente para a realização de experimentos práticos. No produto
INTERGROUP estavam disponíveis apenas as classes sem o código fonte. No produto
JGROUP além das classes para execução também estava disponível o código fonte
com todos os arquivos do tipo fonte JAVA. No terceiro mecanismo de comunicação
em grupo selecionado, o SPREAD, além de uma completa documentação, versões
compiladas para diferentes plataformas também uma copia completa de todos os
fontes estavam disponíveis via Internet. Considerando que este mecanismo SPREAD
poderia ser empregado em diferentes plataformas de hardware como Intel,
PowerPc, Risc e diferentes sistemas operacionais como UNIX, WINDOWS, Mac OS e
ambiente JAVA, este foi o mecanismo escolhido para ser usado na avaliação de
desempenho e aplicação de demonstração que é descrita no capítulo 8.
Estes três mecanismos serão objetos de análise mais detalhada nos
capítulos seguintes.
O protocolo INTERGROUP, resultado de uma dissertação de Berket (2000),
submetida à Universidade da Califórnia – Santa Bárbara em dezembro de 2000. É
voltado para o ambiente de Internet, apresentando escalabilidade em ambiente de
rede com alta latência e grande número de nós.
O protocolo INTERGROUP trata o problema da escalabilidade sobre
diferentes enfoques. Ele redefine o conceito de membros do grupo, permitindo
alterações voluntárias dos membros do grupo, adicionando uma seleção orientada
a recepção de garantias de entrega que permite heterogeneidade no conjunto de
receptores e prove serviços confiáveis em ambientes de larga escala. O sistema INTERGROUP compreende vários
componentes executando em vários equipamentos formando um sistema único. Cada
componente é responsável por parte dos serviços necessários para implementar um
sistema de comunicação em grupo para redes WAN. Os componentes podem ser
categorizados como: (1) controle de hierarquia, (2) multicast confiável,
(3) envio e entrega de mensagens e (4) controle de processos membros do grupo.
A implementação do protótipo do INTERGROUP foi feita em JAVA e os testes de
performance quando do desenvolvimento foram feitos tanto em redes LAN como WAN.
O protocolo INTERGROUP se propõe a diminuir o custo dos algoritmos de
reparação necessários para o controle dos membros do grupo usando as seguintes
estratégias. No sistema INTERGROUP nem todos os processos são considerados
iguais. Em cada processo do grupo ele é classificado segundo a sua atividade
mais recente. Se o processo envia dados
para o grupo recentemente é classificado como um emissor ativo. Emissores
ativos são membros do grupo emissor no processamento em grupo. Somente os
emissores pertencentes a este grupo emissor necessitam participar nos
algoritmos de decisão por consenso.
Também são usados mecanismos voluntários para entrar ou sair de um grupo. Estes mecanismos voluntários têm a vantagem de não exigir a
execução dos algoritmos de reparo no controle de membros do grupo.
Também avança além dos conceitos tradicionais relativos a escolha do
serviço de entrega das mensagens provendo mais flexibilidade para a aplicação e reduzindo os custos dos
algoritmos de reparação no controle de membros do grupo. No sistema INTERGROUP a entrega de mensagens
que vem de um processo do grupo é determinada pela aplicação, no lado do
receptor. Cada processo pode escolher diferentes tipos de entrega. Os seguintes
serviços de entrega estão disponíveis:
·
Não confiável e não ordenada – Mensagens recebidas pelo
grupo são entregues diretamente a aplicação. Algumas mensagens podem não ser
recebidas e também múltiplas cópias da mesma mensagem podem ser recebidas. Além
disso não há garantia na ordem em que as mensagens são recebidas. É a
funcionalidade básica provida pelo IP multicast.
·
Confiável ordenada na fonte – Todas as mensagens de uma
fonte em particular serão recebidas pela aplicação (a menos que tenha uma falha
no processo) e elas serão entregues ordenadas em numeração seqüencial. Este
serviço é bem adequado para aplicações tipo transferência de arquivos em multicast
e outras aplicações que usam TCP/IP. O serviço fornecido é similar ao TCP/IP.
·
Grupo confiável ordenada por tempo – Mensagens são
recebidas pela aplicação em uma ordenação baseada em tempo considerando todo o
grupo. As possíveis alterações de membros do grupo que possam ocorrer são
controladas de forma a assegurar que as mensagens recebidas pelas aplicações
obedeçam a um sincronismo virtual.
Este serviço está próximo da idéia de mensagens com acordo nos sistemas
de comunicação em grupo.
O controle da informação no sistema INTERGROUP é comunicado através do
grupo de controle. O grupo de controle consiste de exatamente um processo de
controle em um determinado equipamento de todo o conjunto. Um processo de
controle roda independentemente dos outros processos em um equipamento. Cada
processo em um equipamento envia e recebe informações de controle via o
processo de controle em seu equipamento. Um processo de controle não interage
diretamente com a aplicação. Os processos de controle são organizados em uma
estrutura hierárquica auto-organizável.
O sistema INTERGROUP é composto de diversos componentes, executando em um
mesmo equipamento. Cada componente é responsável por parte do serviço
necessário para construir um sistema de comunicação em grupo para ambiente WAN.
Os componentes podem ser categorizados como:
·
Controle de hierarquia – Usado para a troca de
informações de controle entre os equipamentos no sistema. Cada equipamento tem
um processo de controle que é responsável pelas informações de controle para
todos os outros processos neste equipamento. O controle de hierarquia também provê mecanismo para determinar a
estabilidade de mensagens, e o mecanismo para buscar uma forma fraca de
consenso para o grupo.
·
Multicast confiável – Mecanismo para requisitar
a retransmissão de mensagens, mecanismo para retransmitir as mensagens e para
detectar se uma mensagem precisa ser recuperada.
·
Distribuição e entrega de mensagens – Executa o
controle de fluxo nas mensagens enviadas para um grupo, ordena e entrega
mensagens para a aplicação baseada na escolha pela aplicação do serviço de
entrega e detecta mensagens faltantes.
·
Processamento de controle dos membros do grupo – Mantém
uma visão de todos os participantes membros do grupo. Esta visão depende do
serviço de entrega selecionado pela aplicação e se o processo é membro do grupo
que pode enviar.
O INTERGROUP está
implementado como três componentes principais. O controle de hierarquia, multicast
confiável e ordenamento e entrega de mensagens. Cada componente é construído
usando um conjunto de módulos do tipo thread que se comunicam via um modelo de
evento/mensagem assíncrono. Como
diferentes serviços requerem diferentes módulos, cada componente é projetado de
modo que módulos e fluxo de mensagens possam ser dinamicamente construídos e
mantidos. Eles são construídos em volta da classe “InterGroupThreadedModule”
(IGTM). A classe IGTM implementa duas
interfaces: Runnable e MessagePublisher (MP). Também contém uma classe
PriorityQueue que implementa a interface MessageSubscriber (MS). A interface
Runnable é definida na plataforma standard JAVA 2 v1.2.2 API. Permite que IGTM
execute como uma thread.
A interface MP permite
para a publicação de eventos/mensagens para classes que implementam a interface
MS. As subscrições são feitas via método attach. A interface MP também
prove mecanismos para cancelar a subscrição usando método detach. A
implementação da interface MP na classe IGTM usa uma estrutura de dados que
mapeia o tipo de mensagem para MS. Sempre que uma mensagem é publicada via o
método notify, o método update é chamado para cada MS que usa este tipo de
mensagem. Esta implementação permite que assinantes assinem e recebam eventos e
mensagens de diferentes tipos e permite múltiplos assinantes a receber o mesmo
tipo de eventos e mensagens.
A classe PriorityQueue
implementa a interface MS. Recebe mensagens via o método update e guardam elas
em um buffer até que a classe IGTM esteja pronta para processar elas. Quando
IGTM está pronta para receber as mensagens da fila, elas são escolhidas
baseadas em um algoritmo que considera a prioridade das mensagens na fila.
Desta forma não temos garantia que mensagens de diferentes prioridades deixam a
fila na mesma ordem em que chegaram na fila. Contudo mensagens de mesma
prioridade se comportam como FIFO. As propriedades da classe IGTM permitem
fácil ajuste de fluxo de dados dinâmicos, assíncronos e configuráveis entre os
componentes.
Este mecanismo de
comunicação de grupos, INTERGROUP, está
disponível em sua pagina na Internet para ser recebido via Internet. (BERKET,
2000), É fornecido apenas o conjunto de classes em formato binário para ser
executado em uma máquina JAVA. O código fonte não é fornecido. Um pequeno
exemplo de uso, das classes com chamadas básicas para envio de mensagem a
grupos, está disponível junto com o aplicativo. Outro exemplo mostra uma
aplicação de troca de mensagens entre usuários, usando os conceitos de
comunicação em grupo onde cada usuário pode enviar mensagens a todos os membros
do grupo.
A documentação do
INTERGROUP se restringe a alguns artigos e a própria dissertação escrita pelo
autor do produto. Junto com os arquivos binários apenas dois arquivos textos
muito simplificados com informações para instalação e exemplo muito básico de
uso do sistema.
Após instalado o produto,
foram feitos testes com os programas de demonstração que o acompanham. Uma das
aplicações permite o uso do INTERGROUP junto com o aplicativo, na mesma
execução mas neste caso só uma instância do aplicativo é permitida. Para testar
o aplicativo de troca de mensagens foi ativada uma instância do servidor
INTERGROUP no WINDOWS e mais 5 clientes para troca de mensagens sendo dois
clientes no LINUX e três clientes no WINDOWS. Como tanto o servidor como os
clientes estão codificados em JAVA, a performance do sistema apresenta uma
lentidão muito grande na execução. Só para montar a tela gráfica cada chamada
do cliente leva em torno de 30
segundos. Cabe ressaltar que quando foi
configurado para que o servidor INTERGROUP rodasse no LINUX, pensando em uma
melhor performance, o mesmo não funcionou impossibilitando este teste. Na Figura 27 apresentam-se as telas das três aplicações clientes
de troca de mensagens que estavam rodando no WINDOWS.
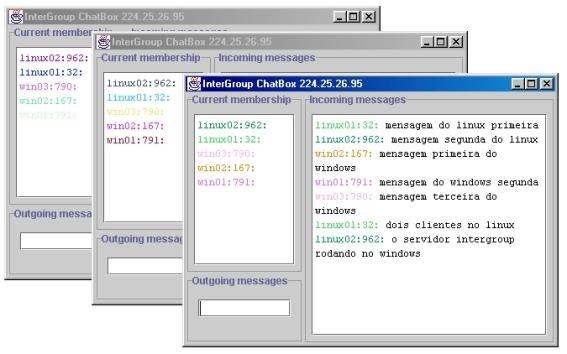
Figura 27 Exemplo do Aplicativo de Troca de Mensagens
Usando INTERGROUP
Este software tem
evoluído pois no início deste trabalho a documentação era mínima e agora no
final, passado alguns meses, ao concluir a avaliação prática, encontramos uma
nova versão de documentação, com mais exemplos e com mais detalhes quanto ao
uso do INTERGROUP. Entretanto, como tudo está em JAVA temos a vantagem da
portabilidade mas de outro lado, a performance deixa a desejar para aplicações
que requerem uma maior volume de transações.
Atualmente, o software está na versão 1.0 alpha e apresenta algumas
deficiências já bem conhecidas tais como:
·
Problemas de memória quando o nó INTERGROUP não libera
memória de forma correta. Alguns objetos não deixam de ser referenciados
corretamente causando falta de memória ao sistema.
·
Após tratar um grande número de grupos, maior que 100,
incluindo e excluindo estes grupos o nó
INTERGROUP deixa de responder.
Isto ocorre porque o nó INTERGROUP usa a classe JAVA.útil. Timer para
programar a execução de algumas tasks e a mesma classe é usada para
todas as tasks que tratam todos os grupos onde com o aumento de uso
ocorre o problema.
·
Quando a aplicação se junta a um grupo ou deixa o
grupo, existe a chance que a implementação da camada multicast confiável
(IGRM) acuse ConcurrentModificationException.
·
Quando se envia dados com Group.send() os dados não
podem ser maior que 64k. Restrição do serviço UDP no JAVA.
·
O grupo faz
partição e junção repetidamente de forma desnecessária durante o tempo de vida
da aplicação. Devido a problemas de performance, o coletor de lixo faz algumas
coletas de forma demorada as vezes e assim algumas theads são suspensas e
nenhuma mensagem é processada neste período dando a falsa impressão de problema
na rede.
Como conclusão, devido a
estes diversos problemas, uma certa instabilidade do software e uma performance
que deixa a desejar neste ambiente JAVA, ve-se que no futuro pode ser um bom
mecanismo de comunicação em grupo para ser usado em máquinas rápidas e
aplicações que tenham afinidade com o ambiente JAVA.
O protocolo Jgroup é o resultado de uma tese submetida à Universidade de
Bologna, Padova, Veneza, Itália por Montresor (2000), em janeiro de 2000.
Baseada no paradigma de orientação a objeto, todo o trabalho foi desenvolvido
de forma a se abstrair a complexidade do sistema e promover a reusabilidade e
modularidade. Todo o trabalho é baseado nos conceitos de orientação a objeto
como abstração, encapsulamento, herança, polimorfismo e permitindo uma
interação cliente/servidor entre objetos distribuídos. Esta tese propõem o
paradigma do grupo objeto onde funções de serviços distribuídos são replicados
formando uma coleção de objetos servidores logicamente relacionados formando em
conjunto um grupo objeto. Um grupo constitui uma facilidade de endereçamento
lógico: clientes interagem de forma transparente com grupos de objetos
invocando remotamente métodos destes objetos, como se fosse um único objeto
remoto não replicado.
JGROUP é uma extensão do modelo de objeto distribuído JAVA, baseada no
paradigma de comunicação em grupo. Diferentemente de outras extensões
orientadas a grupo de modelos
existentes de objetos distribuídos, JGROUP é expressamente apontado para
suportar o desenvolvimento de aplicações distribuídas confiáveis e com alta
disponibilidade em ambientes com particionamento de rede. JGROUP permite a
criação de grupos de objetos remotos que cooperam entre si na busca de um
objetivo comum usando um serviço de comunicação em grupo que aceita
particionamento de rede. Grupos de
objetos remotos simulam o comportamento de objetos remotos padrões,
implementando um conjunto de interfaces remotas e permitindo a clientes invocar
remotamente os métodos definidos nestas interfaces através do mecanismo padrão
de RMI do JAVA. JGROUP é complementado
por um serviço de estado de intercalação, o qual simplifica o desenvolvimento
de protocolos de intercalação, necessários para restabelecer um estado
consistente após desaparecer o particionamento.
O JGROUP é uma extensão do paradigma de grupo de objetos de forma a
suportar aplicações cliente do particionamento da rede. Para alcançar estes
objetivos, alguns pontos têm que ser considerados:
·
Quando se desenvolvem aplicações que se preocupam com o
particionamento da rede, os servidores
incluídos em uma visão precisam estar cientes se ocorrer um particionamento.
Para controle de membros de grupo de uma partição primaria não é conveniente
que sejam notificados os serviços sempre que ocorrer uma mudança de cenário
devido à falha. De forma contrária todos os servidores participantes de uma
computação que se preocupa com partição
de rede, devem ser continuamente informados sobre o cenário corrente de
particionamento, para se reconfigurar entre eles e ajustar seu comportamento
conseqüentemente.
·
Em um sistema de grupos de objetos o comportamento de
um serviço de comunicação confiável é altamente dependente do serviço de
controle dos membros do grupo adotado. Se enfocarmos apenas em partição
primária, todas as comunicações são endereçadas para o servidor incluído na
visão primária. O projeto das aplicações é simplificado pois temos um único
fluxo de comunicação no sistema. Aplicações que se preocupam com
particionamento, contudo, podem ter diferentes requisitos. Cada servidor precisa
estar apto a comunicar com servidores incluídos em sua visão e clientes têm que
poder contactar pelo menos um servidor incluído na sua partição. Cada
comunicação envolvendo o grupo precisa seguir as semânticas de sincronismo de
visão: dois servidores que instalam o mesmo par de visões consecutivas e na
mesma ordem, entregam o mesmo conjunto de eventos de comunicação no tempo
ocorrido entre as duas instalações.
·
Quando se considera comunicação em grupo que tratam
particionamento existe a possibilidade que servidores em partições concorrentes
continuem a servir operações externas independentes e gerando inconsistência.
Quando as condições que estavam causando o particionamento deixam de existir
uma aplicação específica usando protocolo de intercalação de estado tem que ser
executada para definir um novo estado global que reconcilia as divergências que
estavam ocorrendo. De forma geral, protocolos de intercalação de estado, são
mais complexos que o correspondente protocolo de transferência de estado em
partições primárias: o anterior é baseado em trocas de informações
bidirecionais entre duas partições que estão se intercalando, enquanto o último
é baseado na transferência de informação de servidores já pertencentes a visão
primária para servidores que dinamicamente se juntaram a partição primária.
Como têm diferentes requisitos, aplicações que tratam particionamento,
não podem ser baseadas no sistema tradicional de grupos de objetos que
consideram o enfoque de partição primária.
Por esta razão JGROUP provê em contrapartida uma versão dos serviços
anteriormente listados para o ambiente particionado:
·
Serviço de membros do grupo particionaveis, PGMS (Partitionable
Group Membership Service) – A tarefa do PGMS é manter os membros
continuamente informados sobre o cenário corrente de falhas, incluindo tanto
particionamento como queda do servidor. Aplicações que tratam particionamento
são programadas de forma a se reconfigurarem por si só e ajustar o
comportamento baseado na composição das visões instaladas. Na ausência de
particionamento, cada servidor ativo deve instalar a mesma visão e esta visão
precisa incluir exatamente estes servidores que estão funcionando normalmente.
Se um particionamento ocorrer nosso serviço de membros do grupo particionaveis,
garantirá que sobre certas condições, servidores ativos na mesma partição,
instalarão visões idênticas e que a sua composição da visão corresponderá à
composição da partição.
·
Serviço de grupo, GMIS (Group method Invocation
Service) – O serviço de comunicação incluído no JGROUP é estritamente
integrado com o PGMS, e assim oferece um serviço ciente do particionamento.
Clientes estão aptos a interagir com servidores que pertencem a sua partição
corrente, e servidores incluídos numa visão estão aptos a coordenar seu
comportamento usando as facilidades dos serviços de comunicação de grupos.
Diferentemente de outros sistemas existentes de grupos de objetos, JGROUP provê
somente um serviço de invocação do método grupo que gerência todas as
comunicações envolvendo membros do grupo. Em outras palavras não apenas
clientes interagem com servidores de grupo através da chamada de métodos
remotas neles, mas também interação interna ao grupo são baseadas no mesmo
paradigma. Como são caracterizados por diferentes propriedades, denomina-se de
chamada de métodos a grupos externos estas executadas pelos clientes e chamadas
de métodos a grupos internos esta executadas pelos servidores. O serviço de
chamada multi-chamada/multi-resposta incluído no JGROUP tem muitas vantagens
com respeito à comunicação de grupo baseada em mensagens do tipo multicast.
O desenvolvimento de complexas consistências nos protocolos cientes de
particionamento é simplificado já que operações de empacotamento e
desempacotamento de parâmetros e disparo de chamadas são manuseadas
automaticamente pelo GMIS. Programadores de aplicação podem tirar vantagens do
paradigma de orientação a objeto sugerido pelas chamadas internas no JGROUP; em
particular mecanismos tais como encapsulamento, herança e polimorfismo podem
ser particularmente úteis quando se desenvolvem aplicações complexas.
Finalmente o modelo de comunicação unificado permite uma especificação mais compacta com respeito ao sistema de
grupo de objetos que misturam mensagens multicast e chamada de método
remoto.
·
Serviço de intercalação de estado, SMS (State
Merging Service) – A tarefa do SMS é suportar aos desenvolvedores no
projeto e implementação dos protocolos de intercalação de estado, para suas
aplicações. De forma similar à transferência de estado usado em partições primárias,
SMS se encarrega de consultar os servidores de forma a obter informações sobre
o estado corrente da computação e
difundir para outras partições. Membros do grupo precisam prover operações para
obter o estado corrente da computação em uma partição e intercalar esta
informação com o estado das outras partições.
Figura 28 Arquitetura do JGROUP
O PGMS, GMIS e SMS constituem os componentes básicos da arquitetura
JGROUP, conforme listado na Figura
28. O objetivo do modelo JGROUP é abranger um conjunto
mínimo de requisitos que uma ferramenta para programação orientada a objetos em
aplicações que se preocupam com particionamento precisa atender.
Um exemplo de
configuração do JGROUP é o que está sendo apresentado na Figura 29. O sistema é composto de uma coleção de máquinas
virtuais JAVA conectadas através de uma rede de comunicações. Cada máquina
virtual JAVA hospeda uma coleção de objetos. Objetos servidores coordenam suas ações de forma a prover
alguns serviços para objetos clientes. Clientes acessam os serviços providos
pelos grupos objetos através da invocação de métodos do grupo.
Figura 29 Arquitetura do JGROUP em Máquinas JVM
As facilidades de
comunicação em grupo são providas para objetos servidores pelo gerenciador de
grupo GM (Group Manager) que atua como um proxy para executar
chamadas internas do método grupo e prove primitivas para o gerenciamento de
grupo. Cada servidor é associado com um GM para cada um dos grupos ao qual ele
se conecta enquanto cada GM é associado exatamente a um servidor. GM são
responsáveis por notificar seus servidores de comunicação de grupo eventos tais
como mudanças de visão, além do mais GM também se encarregam de disparar
chamadas internas e externas. Gerenciadores de grupo não implementam todos os
serviços de comunicação de grupo descritos anteriormente. Facilidades básicas
de comunicação como e controle de
membros do grupo são implementadas em um modulo separado chamado JGROUP Daemon.
Em uma máquina JAVA JVM que está hospedando servidores JGROUP, uma única
instância do daemon JGROUP é executada. Os daemons JGROUP se
comunicam entre eles para trocar mensagens e informações de facilidades de acesso.
Existem diversas
motivações por trás da escolha de usar este modelo de arquitetura, em
contrapartida a ter serviços de comunicação de grupo sendo executados por cada
gerenciador de grupo:
·
O número de mensagens trocadas para estabelecer
comunicação em grupo é reduzido: por exemplo serviços de baixo nível como
detecção de falhas são implementados por daemons JGROUP um em cada
máquina JVM e não um em cada GM.
·
Com este modelo é possível distinguir entre objetos
servidores locais para uma dada máquina JVM e outros que sejam remotos.
Servidores locais para uma dada máquina sempre compartilham o mesmo destino com
respeito à falhas: uma falha da máquina JVM causa uma falha em todos os
servidores hospedados nela, e se uma máquina JVM se torna particionada do resto
do sistema, todos os seus servidores locais param de se comunicar com os
servidores remotos. Então dois controles de membros são mantidos de forma
distinta, um relativo a servidores e outro relativo a daemons. Variações
voluntárias de controle dos membros decorrentes do fato de se juntar ou sair do
grupo são traduzidas em mensagens únicas requisitando a mudança na lista de
servidores hospedados em um daemon, sem requerer protocolos complexos de
negociação.
·
Esta arquitetura baseada em daemons pode ser extendida
e melhorada pela permissão de objetos servidores em uma máquina JVM poder usar
um daemon rodando em outra máquina JVM. Isto pode ser interessante para
escalabilidade, bem como ser possível estruturar o sistema de forma a ter uma
única instância do daemon JGROUP em cada LAN contendo objetos
servidores. Desta forma é possível compartilhar os custos de manutenção do
protocolo de controle dos membros entre os servidores que compõem a LAN, assim
reduzindo o número de mensagens trocadas. Esta extensão contudo ainda não está
implementada no protótipo JGROUP.
Clientes não necessitam daemons
JGROUP e gerenciadores de grupo rodando em suas máquinas virtuais; a interação
entre clientes e servidores é manuseada por um componente chamado GMI
stub. Cada stub permite clientes
executar chamadas externas a métodos em um único grupo; assim diversos stubs
podem co-existir na mesma máquina JVM.
Figura 30 A Arquitetura do Daemon JGROUP
Cada daemon JGROUP
tem uma estrutura em camada como ilustrado na Figura
30, composta dos seguintes componentes lógicos:
·
Camada de multi envio, MSL (Multi-Send Layer) –
Implementar serviços de membro do grupo diretamente sobre serviços de
transporte de datagrama sem sequencia, não confiável, ponto a ponto, providos
pela rede se torna difícil. A tarefa do
MSL é esconder esta complexidade transformando esta primitiva da rede ponto a
ponto não confiável, em sua contrapartida melhor-esforço, um para muitos.
Informalmente MSL tenta entregar as mensagens enviadas desta forma para todos
os daemons que estão em uma lista de destinação. Contudo mantém os daemons
informados sobre qual servidor está acessível e qual está com suspeita de não
ser acessível.
·
Camada de controle de membros do grupo particionavel,
PGML (Partitionable Group Membership Layer) - Os serviços providos pela MSL são usados pela PGML de forma a
construir e instalar visões como definido pela especificação PGMS. A tarefa da
PGML é gerenciar o controle de mebros do grupo de múltiplos grupos atendendo
requisições de entrar e sair do grupo, vindas dos servidores e traduzir as
possíveis suspeitas de inconsistências geradas pelo MSL em visões válidas para o novo contexto.
·
Camada de multicast confiável, RML (Reliable
Multicast Layer) – A tarefa do RML é prover um serviço de multicast
confiável baseado em mensagens. RML é
integrado com a camada de controle de membros do grupo e satisfaz a versão
baseada em mensagens das propriedades de sincronismo de visão.
Daemons JGROUP são
os blocos básicos para a arquitetura JGROUP; eles provêem os componentes
fundamentais do serviço de comunicação em grupo, tais como detecção de falhas,
controle de membro do grupo e multicast confiável. Facilidades
adicionais, tais como chamadas a métodos de grupo e intercalação de estados são
atendidas pelo gerenciador de grupos. A
arquitetura interna do gerenciador de grupos é altamente modular e foi
projetada para possibilitar facilmente a inserção de novas camadas implementando
facilidades adicionais não descritas neste trabalho. Por exemplo, seria
possível inserir camadas de ordenação para executar ordenação invocando método
grupo com semânticas do tipo FIFO, causal e atômica.
Figura 31 Dois Possíveis Empilhamentos das Camadas de
Gerenciamento de Grupos
Na Figura 31 ilustram-se as configurações que o gerenciador de
grupos pode assumir na versão corrente do JGROUP. Três diferentes camadas podem
compor o gerenciador de grupos:
·
Camada de interação com daemon, DIL (Daemon
Interaction Layer) – A tarefa desta camada é tratar a interação entre
gerenciador de grupos e daemons.
Esta camada transmite primitivas básicas de comunicação em grupo (tais
como join, leave e mcast) para o daemon JGROUP que está rodando no sistema; além disso, enfileira as chamadas vindas do daemon
JGROUP e entrega elas para a camada superior.
·
Camada de chamada do método grupo, GMIL (Group
Method Invocation Layer) – GMIL usa os serviços providos por RML através de
DIL para prover os serviços de comunicação conforme o paradigma de comunicação
em grupo. Como as informações relativas ao sincronismo de visões são tratadas
pelo RML, a única tarefa desta camada é gerencias os problemas relacionados aos
métodos de disparo, concatenar e desconcatenar parâmetros e coletar valores de
código de retorno.
·
Camada de intercalação de estado, SML (State Merging
Layer) – Esta camada provê as facilidades de intercalação de estados.
Para inserir uma camada
no gerenciador de grupos, é necessário implementar duas interfaces: Member para
interceptar e enviar notificações de comunicação de grupo chamadas pelas baixas
camadas e GroupManager para aceitar primitivas de gerenciamento de grupo
chamadas pelas altas camadas e enviar então para camadas inferiores. A única exceção
é o daemon da camada de interação que implementa somente a interface
GroupManager e interage diretamente com o daemon JGROUP.
Este mecanismo de
comunicação de grupos, JGROUP,
está disponível em sua pagina na
Internet para ser feito download (MONTRESOR, 2000). São fornecidos tanto
o código fonte de todos as classes, arquivos com terminação java, bem como uma
documentação em HTML para todas as classes e seus métodos. Tem makefiles para a compilação de
todas as classes e exemplos de uso para ilustrar o uso do JGROUP.
A instalação foi feita em
duas máquinas, uma com ambiente WINDOWS e outra com ambiente LINUX. O software
tem evoluído nos últimos tempos tendo inclusive diversas versões disponíveis e
a cada nova versão além de correção de falhas, a documentação para o uso do
software tem evoluído bastante.
Um dos exemplos que
acompanham mostra o funcionamento de um servidor de grupos e um cliente que
quando faz o contato com o servidor, recebe uma hora gerada no servidor. Na Figura 32 que segue apreseta-se um exemplo da tela durante a
execução do servidor Hello Server e do cliente.
Figura 32 JGROUP Exemplo Hello Server
Pode se observar na tela
que está na frente, o programa HelloServer que no inicio tem um único membro do
grupo e gera um Time. Em seguida outro membro do grupo é ativado na outra
máquina, outro servidor HelloServer, que é mostrado na tela. O primeiro membro
do grupo “Member 0” com endereço mg/192.168.0.10 (WINDOWS) e o segundo membro
do grupo “Member 1” com endereço 192.168.0.21 (LINUX). Para cada membro do
grupo que se junta ao grupo, um novo servidor HelloServer, é gerado um Time
associado a este servidor.
Para os programas
clientes, cada execução vai consultar o
HelloServer e receberá o Time do servidor. Assim na mesma Figura 32 na tela que está sobreposta tem-se a execução do
programa HelloClient mostrando primeira resposta com um servidor ativo onde
recebe o Time daquele servidor e em seguida a resposta com dois servidores
ativos mostrando agora dois valores de Time dos dois servidores.
A ativação dos Daemon
que tratam o JGROUP é feita anteriormente através da execução da classe
rregistry. Para todas estas aplicações sempre é necessário informar um arquivo
de parâmetros, contendo o endereço IP ou o nome da máquina (Resolução via DNS)
onde estão os Daemon do JGROUP.
Outra aplicação de teste
avalia a performance de chamadas de métodos a grupo externos (GMI). Um programa
servidor e um cliente trabalham em conjunto para a realização
deste teste de velocidade. Na Figura
33 apresenta-se as telas do programa cliente em primeiro
plano e no fundo do Servidor para medida de performance do GMI.
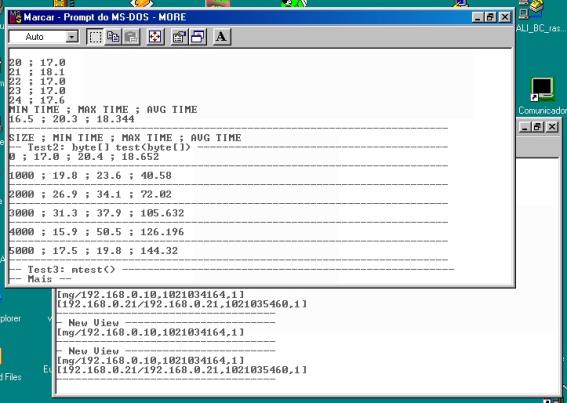
Figura 33 Aplicação de Medida de Performance Servidor
GMI
Também um arquivo log é
gravado para cada cliente, contendo os resultados dos testes. O teste consiste
em diversas chamadas consecutivas de um método, medindo para cada chamada o
tempo que leva para ser executada esta chamada. Ao final de 24 chamadas
diferentes é apresentado o tempo mínimo, o tempo máximo e o tempo médio das
chamadas usando o GMI do JGROUP. Inicialmente são feitos dois conjuntos de
testes sendo o primeiro para chamadas anycast/unicast sem argumentos passados como parâmetro e sem
retorno de valores e o segundo passando como parâmetros um array e tendo valor de retorno. Neste segundo
teste são 5 chamadas com o tamanho do array variando de 1000 a 5000 bytes com incremento de 1000.
Para complementar o teste estes mesmos dois conjuntos de procedimentos
anteriormente descritos são repetidos agora porém para multicast.
Um último teste
semelhante ao anteriormente descrito foi realizado e mede a performance usando
as mesmas rotinas da medida anterior, porem com chamadas usando o método de
invocação remota do JAVA o RMI. Tanto para as chamadas sem parâmetros como para
as chamadas passando arrays, os tempos foram menores usando JAVA RMI ao
invés do GMI do JGROUP.
Como conclusão pode-se
dizer que este mecanismo de comunicação em grupo, o JGROUP, é muito
interessante por usar o conceito de Daemon que pode centralizar o
controle em um determinado segmento da rede.
Também pode-se ter mais do que um Daemon no mesmo segmento para
melhor distribuir o controle dos clientes que usam o mecanismo de grupo.
Durante os testes práticos simulou-se a queda de rede entre dois Daemons,
forçando um particionamento e quando se reconectou, a junção foi realizada com
sucesso, mostrando uma nova visão do grupo agora com todos os componentes do
grupo. Quanto à performance por ser em ambiente JAVA, deixa muito a desejar.
Como vantagem tem todos os conceitos modernos da orientação a objetos,
permitindo uma perfeita aplicação destes conceitos em um ambiente de
comunicação em grupos, orientado a objetos. Cabe ressaltar que o ambiente
necessário para testar estas aplicações tem que ser configurado adequadamente,
ter máquina JAVA instalada em cada cliente e uma configuração de parâmetros bem
detalhada e complexa. Alguns erros foram notados durante a execução e fica a
duvida se eram do aplicativo ou do ambiente JAVA. É fundamental um profundo
conhecimento do ambiente JAVA para se usar este mecanismo de Comunicação em
Grupo.
Este mecanismo de Comunicação em Grupo, chamado SPREAD (AMIR, 1998), será
detalhadamente descrito neste capítulo. O SPREAD foi o mecanismo escolhido para
ser usado na ferramenta de gerenciamento de recursos que ilustra este estudo e
esta ferramenta estará descrita no capitulo 8. Assim as características e
recursos deste mecanismo de Comunicação em Grupo são aqui apresentados.
Existem algumas dificuldades fundamentais com comunicação em grupo de
alta performance, usando redes de longa distância WAN. Estas dificuldades
incluem:
·
As características (baixas taxas, quantidade de buffer)
e performance (latência e largura de banda) variam largamente em diferentes
partes da rede.
·
As taxas de perdas de pacotes e latência são significativamente
maiores e mais variáveis do que em redes locais.
·
Não é tão fácil de implementar de forma eficiente, a
ordenação e a confiabilidade sobre os mecanismos de multicast
disponíveis em redes de grande
distância como sobre o multicast e o broadcast em hardware
de rede local. Sobretudo porque o mecanismo disponível de multicast por
melhor esforço para redes de
grande distância vem com limitações
significantes.
Devido a estas dificuldades, o trabalho tradicional da comunidade de
comunicação em grupo, não tem provido soluções adequadas para redes de banda
larga mesmo anos após terem sido
desenvolvidas boas soluções para rede local. O volume de trabalho hoje voltado
para redes de larga escala vem da comunidade de redes, iniciando pelo IP multicast
melhor esforço e construindo serviços confiáveis e alguma ordenação com uma
semântica muito mais fraca do que na comunicação em grupo. Este software SPREAD
tem o ponto de vista da comunidade de comunicação em grupo. Implementa contudo,
técnicas e facilidades de projeto que não são diferentes das técnicas usadas
para prover confiabilidade sobre IP-Multicast e leva disseminação e
controle de fluxo para redes de banda larga. Assim um sistema de comunicação em
grupo tem extensivo e detalhado
conhecimento do sistema, os protocolos usados podem ser mais precisos e
produzirem melhor performance do que muitos protocolos de redes genéricos. Esta
melhora contudo, vem com um custo. SPREAD faz mais trabalho por nó e não pode
crescer demasiado o número de usuários. Contudo ele pode ser disponibilizado a
rede de grande distância e pode crescer
em número de grupos instalado na rede
já que não precisa ser mantido tabela de estado nos roteadores da rede para
cada grupo. O sistema de comunicações em grupo SPREAD trata as dificuldades
encontradas em redes de grande
distância através de três principais características do projeto:
·
SPREAD permite o uso de diferentes protocolos de baixo
nível para prover disseminação confiável de mensagens, dependendo da
configuração da rede. Cada protocolo tem diferentes parâmetros de otimização
aplicados a diferentes partes da rede. Em particular SPREAD integra dois
protocolos de baixo nível: um para rede local chamado RING e um para
rede de larga escala chamado HOP.
·
SPREAD usa a arquitetura tipo cliente servidor,
“cliente-daemon”. Esta arquitetura tem muitos benefícios, o mais
importante para ajustes em grande
distância é a habilidade de pagar um preço mínimo para as diferentes
causas de alterações de membros do grupo. O fato de um processo se associar a
um novo grupo ou deixar este grupo se resume a uma simples mensagem. Um
processo se desconectar ou conectar ao daemon não paga o alto custo
envolvido em trocar as tabelas de roteamento na rede de grande distância. Somente as partes que compõem as
redes locais necessitam trocar entre si estes roteamentos.
·
SPREAD separa o mecanismo de disseminação e segurança
local do protocolo global de ordenação
e estabilidade. Esta separação permite que mensagens possam ser enviadas a rede
imediatamente independente de outros controles de perda e ordenação. Isto
também permite selecionar quando mensagens de dados são somente necessárias de
serem enviadas a um mínimo conjunto de componentes da rede, sem comprometer a
forte garantia semântica que temos em grupos de comunicação típica. Em
particular, SPREAD suporta o modelo de sincronismo virtual estendido (MOSER,
1994).
SPREAD tem facilidades na configuração, permitindo ao usuário o controle
sobre o tipo do mecanismo de comunicação e o layout da rede virtual. SPREAD
suporta canais prioritários para a aplicação. Canais prioritários aceleram o
envio de mensagens usando este recurso, enquanto preservam as garantias de
ordenação requeridas. Esta característica deve ter sido o primeiro serviço de prioridade
implementado em um sistema de comunicação em grupo. Finalmente, SPREAD suporta
semântica grupo-aberto onde um processo que envia não precisa ser membro do
grupo para enviar uma mensagem a todos do grupo. O ambiente SPREAD suporta
aplicações multiplataforma pois está disponível para diversos ambientes UNIX
bem como para ambiente WINDOWS e JAVA.
O sistema SPREAD é baseado no modelo daemon-cliente onde
geralmente daemons, que são processos no UNIX que ficam continuamente
executando, estabelecem a rede básica de disseminação de mensagens e fornecem serviços básicos de ordenação e
controle dos membros do grupo. Aplicações, que chamam rotinas de uma pequena
biblioteca para clientes, podem residir em qualquer lugar da rede e irão se
conectar ao daemon que estiver mais perto para ganhar acesso ao serviço
de comunicação em grupo. O uso deste modelo, como oposto de ter os serviços de
ordenação e controle dos membros do grupo atendidos por cada aplicação cliente,
é muito importante em uma rede de grande distância por que os deamons minimizam
o número de trocas no controle dos membros que o sistema tem que fazer através
dos pontos de interligação da rede de grande distância. Além disso, fornece uma
infraestrutura básica e estável na qual se pode construir um eficiente controle
de roteamento e ordenação para redes de grande distância. O inconveniente que se tem ao usar um modelo de dois níveis daemon-cliente
é que pode ocorrer interferência entre dois diferentes clientes que usam a
mesma configuração do daemon. Isto é amenizado pela possibilidade de se
rodarem múltiplas configurações dos daemon, cada uma servindo diferentes
aplicações. Também, pelo modelo de disseminação usado pelo SPREAD, que somente
manda mensagens de dados para aqueles daemons que necessitam das
mensagens minimizando o custo de atividades extras nos daemons que a
aplicação não está usando. Entretanto tem o custo adicional de comunicação
interprocesso e chaveamento de contexto.
SPREAD é bastante parametrizado, permitindo que o usuário possa
configurar o mesmo de acordo com as suas necessidades. SPREAD pode ser
configurado para usar apenas um daemon no mundo todo ou para usar um daemon
em cada máquina rodando aplicação de comunicação em grupo. A melhor
performance, quando não se tem falha na rede, é encontrada se temos um daemon
em cada máquina. Entretanto usando alguns poucos daemons diminui o custo
de recuperação. Em principio, os daemons SPREAD podem ser colocados nos
roteadores das redes onde, por um custo de maior uso de memória (buffer) no roteador, a
segurança de mensagens importantes pode ser aumentada.
Figura 34 A Configuração de uma Rede de Longa
Distância com SPREAD
Um exemplo de rede é mostrado na Figura
34, onde diversos sites são mostrados, geograficamente
dispersos, com diferentes custos de link entre eles. Define-se como site uma
coleção de máquinas que potencialmente pode encontrar outra máquina através de
uma única mensagem, exemplo broadcast, hardware multicast ou IP multicast. Cada site pode ter até dezenas de máquinas
nele, o qual não impacta a escalabilidade do sistema SPREAD, já que todas as
operações não locais a este site escalam com o número de sites e não com o
número total de máquinas envolvidas. Todos os daemons participantes de
uma configuração SPREAD sabem o completo potencial dos membros participante
quando iniciado, mas todo o conhecimento do atual membro participante do daemon ativo é obtido
dinamicamente durante a operação. Cada
site tem um daemon que atua como representante do site, participando da
disseminação na rede de longa distância. Este representante é determinado
baseado nos membros participantes neste momento no site local e não é uma
configuração fixa por hardware.
Figura 35 A Arquitetura do SPREAD
A arquitetura do SPREAD é apresentada na Figura 35. Aplicações do usuário são ligadas com uma biblioteca
SP_lib (ou usam classes JAVA) a qual prove o completo interface para o cliente,
como descrito a seguir. A conexão entre a SP_lib e o daemon é uma
conexão confiável ponto a ponto, seja IPC ou através da rede. Os módulos de
Sessão e Grupos gerenciam as conexões de usuários, gerenciam o processo de
participação dos membros no grupo, e traduzem as mudanças de membros do grupo
no daemon em mudanças de membros do grupo no processo Grupo.
A área sombreada na Figura
35 representa o protocolo interno do daemon. Os
detalhes destes protocolos serão vistos na seqüência. Alguns principais pontos
são:
·
Múltiplas filas existem entre os módulos de Sessão e
Transporte, um para cada sessão. Isto permite o manuseio de prioridades.
·
O módulo de roteamento calcula as árvores de roteamento
baseada nos dados do modulo de rede. O módulo de transporte consulta o módulo
de roteamento para determinar os links (HOPs e RINGs) no
qual cada mensagem será enviada.
·
Diversas instâncias do módulo HOP podem existir,
cada uma delas representando uma facilidade que é usado por uma ou mais árvores
de roteamento.
·
No mínimo um modulo RING trata da disseminação e confiabilidade no
site local se mais de um daemon está ativo neste site.
·
As instâncias de HOP e RING podem ser
destruídas ou criadas de acordo com as mudanças dos membros do grupo.
SPREAD suporta o modelo de Sincronismo Virtual Extendido EVS (MOSER,
1994), de membros participantes do grupo. EVS pode manusear partições da rede e
re-agrupar bem como agregar ou desagregar. Isto provê diversos tipos de
confiabilidade (confiável, não confiável), ordenação (sem ordem, FIFO, causal,
acordada) e serviços estáveis (seguro) para as mensagens da aplicação. Todos os
ordenamentos globais e estabilidade (causal, acordada e segura) são providos
através de todos os grupos. Se duas mensagens são enviadas por diferentes
clientes para diferentes grupos, qualquer um que tenha se juntado a ambos os
grupos recebera as duas mensagens na ordem garantida, mesmo pensando que elas
serão recebidas em diferentes grupos. O ordenamento FIFO é provido com cada
conexão em um daemon, atuando como uma fonte FIFO para propósitos de
ordenamento. Assim como no ordenamento global de mensagens o ordenamento FIFO é
preservado através do grupo. Em redes de longa distância a entrega confiável se
torna útil por que em principio não terá uma penalidade de latência comparado com entrega não
confiável por que pode ser entregue tão logo seja recebido. A entrega usando
FIFO se torna útil por que uma mensagem somente será bloqueada de ser entregue
se uma mensagem anterior a esta da mesma aplicação conectada estiver faltando.
A complexidade no SPREAD está escondida atrás de uma simples mas completa
interface de programação de aplicação (API) que pode ser usada tanto para
serviços orientados a redes locais como para redes de grande distância sem
mudança na aplicação e que prove um modelo claro de comunicação em grupo. Esta
API do SPREAD é vista na Figura
36. Uma aplicação pode ser escrita usando apenas 5
funções (SP_connect, Sp_join, SP_leave, SP_multicast, SP_receive) enquanto a interface de programação da
aplicação completa permite funções avançadas tais como envios e recebimentos
espalhados (scatter-gather), envio multi grupo, polling em uma
conexão ou comparação de identificação de grupos. O detalhamento desta API
usada no SPREAD está descrito adiante em 7.4.
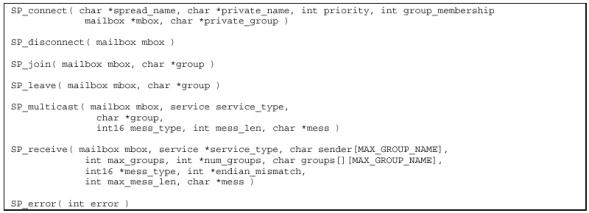
Figura 36 A Interface de Programação de Aplicação API
- SPREAD
O SPREAD trata com protocolos específicos para ligação local entre os daemons
ou para ligação via rede WAN entre os daemons. Detalhes destes
protocolos são vistos na seqüência .
O que se tem de mais importante no sistema SPREAD são os protocolos que
suportam disseminação, confiabilidade, ordenação e estabilidade. Duas camadas
de protocolos separados atendem este serviço no SPREAD:
·
Camada de rede – composta de dois componentes:
o Para
o Nível de Link que provê confiabilidade e controle de fluxo para os pacotes,
SPREAD implementa dois protocolos, o protocolo HOP para conexões ponto a
ponto e o protocolo RING para domínios multicast. Cada protocolo
é otimizado para o seu domínio específico.
o Roteamento
que constrói a rede de saída dos HOPs e RINGs baseado nos membros
de grupos que estão conectados no deamon no momento e seu conhecimento sobre a
rede sobre a qual está trafegando. A rede construída é implementada através de
uma árvore de disseminação diferente e residente em cada site.
·
Camada de transporte – esta camada trata da entrega de mensagens, ordenação,
estabilidade e fluxo de controle global. A camada de transporte opera através
de todos os daemons ativos no sistema.
Construindo uma árvore de roteamento em cada site é importante por
diversas razões. Esta claro que ter uma árvore otimizada em cada site é mais
eficiente do que uma árvore compartilhada. Uma vez que SPREAD não foi criado
para escalar além de diversas dezenas de sites (cada site contendo até diversas
dezenas de daemons) o custo de calcular estas árvores manter e
disseminar as tabelas é gerenciável. O benefício é enorme, especialmente porque
estados e informações de roteamento são mantidos em cada nó final.
É importante lembrar que o overhead de construir estas árvores
pode ser amortizado devido ao longo tempo de vida do membro do grupo em cada
site. Isto está em contraste com muitos protocolos de roteamento multicast
os quais assumem que a árvore precisa
somente ser construída como uma necessidade, desde que mudanças nos membros participantes do grupo são muito
comuns e então a árvore tem que ser refeita rapidamente.
Para utilizar a infraestrutura de rede tão eficiente quanto possível, é
necessário enviar o máximo de pacotes
completos. De forma a utilizar diferentes tamanhos de pacotes e ter a
habilidade de empacotar múltiplas mensagens de usuários ou pacotes de controle
em um único pacote de redes, todos os protocolos da camada de link atualmente
tratam não pacotes mas objetos abstratos que podem variar de tamanho desde 12
bytes até 700 bytes. Cada pacote enviado na rede é preenchido com quantos
objetos forem necessários. Para facilitar
o entendimento, todos os protocolos descritos a seguir são em termos de
pacotes. Na prática, contudo, a
confiabilidade e o controle de fluxo no nível de link são feitos por objetos.
O serviço mais básico de qualquer protocolo de comunicação multicast
compreensivo é a disseminação de mensagens de dados para todos os receptores
interessados em receber as mensagens. Uma mensagem no nível de aplicação
enviada a um grupo pode variar em tamanho desde 0 byte até 128 Kb. SPREAD para
as mensagens grandes vai fragmentar e remontar de forma que se enquadre no
tamanho do pacote da rede básica e para pequenas mensagens vai agrupar até o
tamanho do pacote da rede básica, sem introduzir tempo de latência inaceitável.
SPREAD constrói árvores de disseminação com cada site para os membros
ativos do grupo formando um nó na árvore, seja folha ou interior. Uma
observação chave em roteamento multicast de propósito geral é que a
estabilidade da árvore de roteamento é muito importante para encontrar
roteamentos confiáveis e exeqüíveis. No sistema SPREAD a separação dos membros
do grupo em três níveis permite que o roteamento de nível mais alto, seja
baseado em uma configuração de sites muito estável, enquanto que aplicações
individuais de membros do grupo possam ser altamente dinâmicas. A criação de métricas reais para decidir como
se conectar aos sites na mais eficiente árvore está sendo investigada.
Atualmente as árvores são construídas aplicando o algoritmo do menor caminho de
Dijkstra para o membro corrente do grupo dinâmico, baseado no grafo completo da
rede básica com pesos sendo definidos estaticamente.
Assim que as árvores de roteamento são construídas o envio de pacotes de
dados baseado nas árvores são feitos segundos os três princípios:
·
Não Bloqueio: Pacotes são enviados independente
da perda de pacotes enviados anteriormente.
·
Retransmissão Rápida: Os pais imediatos dos links
onde houve perda tratam as retransmissões dos pacotes perdidos.
·
Corte: Pacotes não são enviados para links
filhos da árvore se não tem membro interessado no pacote.
O Não Bloqueio e a Retransmissão Rápida são providos pelo protocolo HOP
descrito a seguir enquanto o Corte é provido pelo código de procura no
roteamento o qual filtra todos os links filhos de todos os sites para
onde não temos membros de grupos com o pacote destinado. A identificação de
qual site está interessado em um pacote é feita quando o pacote é criado no
site de origem. A decisão é ligeiramente conservadora, na possibilidade de que
algum site não interessado possa receber o pacote, mas cada site que está
interessado a este é garantido que vai pegar o pacote. Isto é mais comum
durante o período que uma aplicação pede para se juntar a um grupo ou deixar o
grupo mas a operação ainda não foi completada. Para prover a garantia de
ordenação e estabilidade, informações de controle e negociação são enviadas a
todos os sites.
A disseminação dos pacotes,
confiabilidade e controle do fluxo são providas por dois protocolos do
nível de link – o protocolo HOP para conexões ponto a ponto e o
protocolo RING para domínios multicast e broadcast, como
descrito a seguir.
Figura 37 Um Cenário de Demonstração do Protocolo HOP
O protocolo HOP opera sobre um serviço de datagramas não confiável
como o UDP/IP. A idéia básica do protocolo HOP é ter o menor tempo de
latência possível quando está transferindo pacotes através de redes passando
por diversos pontos de roteamento (HOPs) tratando a perda de pacotes em
cada trecho HOP-by-HOP ao invés de tratar fim a fim. A retransmissão de
pacotes acontece imediatamente, entre dois HOPs, mesmo que eles não estejam em ordem. Nos
casos em que for possível rodar o protocolo SPREAD nos roteadores que conectam
sites envolvidos em comunicação de grupos, as vantagens podem ser maiores.
O protocolo HOP usa negação de confirmação NACK, para requisitar
retransmissão de pacotes e confirmação positiva ACK para determinar até que
seqüência de mensagens pode ser removida do buffer de envio. Controle de fluxo
é provido por um controle de fichas recipiente furado (token/leaky bucket)
que limita o número de pacotes que pode ser enviado de uma vez e limita a taxa
geral máxima. Em adição, uma janela deslizante, a qual limita o total de
pacotes que estão saindo no link, é usada para prevenir arbitrariamente longos
tempos de espera para busca de pacotes perdidos. A Figura 37 demonstra o protocolo HOP. Um link HOP é bi-direcional então cada lado
pode enviar para o outro. O lado que envia usa as seguintes variáveis locais:
S_highest_linkseq O
mais alto número de seqüência do link associado a um pacote.
S_other_end_aru O
link de seqüência aru (all-received-up-to) reportado pelo outro lado do
link.
S_cur_windown O
tamanho corrente da janela deslizante usado para controle de fluxo.
O receptor tem as seguintes variáveis:
R_highest_seq O maior
número de seqüência visto neste link.
R_link_aru O
valor da seqüência até o qual todos os pacotes foram recebidos.
Retransmit list Uma
lista encadeada das seqüências dos valores que foram perdidos e estão
aguardando para serem retransmitidos pelo transmissor.
Estas duas
últimas variáveis são usadas tanto pelo transmissor como pelo receptor:
Pkt_cnt_linkack O
número de pacotes enviados ou recebidos desde que o ultimo ack do link foi
enviado.
Max_pkt_btw_ack Um
valor de ajuste, limitando quantos pacotes podem ser enviados ou recebidos
antes de enviar um ack de link.
Três tipos de pacotes são enviados através do link:
·
Dados: Esta é a porção dos dados da mensagem do
usuário ou uma mensagem interna do SPREAD criada por uma camada superior.
·
ACK: Esta é uma cópia do valor do link_aru
corrente do receptor e o highest_linkseq do transmissor.
·
NACK: Esta
é uma lista de valores de todas as seqüências que o receptor perdeu e
precisa ser retransmitida.
Tanto os ACKs e NACKs estão limitados ao link no qual eles originam.
Durante uma operação normal o lado que envia em um link HOP vai
mandar pacotes de dados, ocasionalmente um ACK de link e vai receber ACKs de
link vindos do lado do receptor. Isto continua enquanto o receptor está de
acordo com o transmissor limitado ao tamanho da janela deslizante e não ocorrem
perdas de pacotes.
Quando o receptor recebe um pacote com um número de seqüência maior que
seu controle interno (r_hihest_seq + 1), então ele perdeu algum pacote e neste
caso adiciona todas as seqüências entre o r_highest_seq e o que recebeu na
seqüência do objeto na lista de retransmissão.
Neste ponto inicializa um contador para esperar um curto espaço de tempo
e ver se os pacotes perdidos estavam apenas atrasados ou fora de ordem na rede,
se o tempo expira e ainda tem pacotes na lista de retransmissão então um NACK
de link é enviado requisitando estes pacotes. O link de NACK será reenviado com
a lista corrente dos pacotes faltantes cada vez que expirar este contador de
tempo até que todos os pacotes faltantes sejam recebidos. O receptor mantém um
contador de quantas vezes cada seqüência foi requisitada para ser
retransmitida. Se este contador assume um determinado valor então o receptor
declara o transmissor como morto e inicia uma alteração de membro do
grupo. Esta alteração de membro do grupo ocorre mesmo que o receptor tenha recebido outros dados do transmissor e é
muito importante para eliminar este problema de falha no recebimento senão o
sistema será forçado a ficar bloqueado eventualmente devido ao buffer ficar
cheio.
Quando o transmissor recebe um NACK de link ele adiciona os pacotes
requisitados na fila de dados a serem enviados e exclui o NACK. Os pacotes
retransmitidos serão incluídos como dados enviados no calculo do controle de fluxo. A Figura 38 apresenta o pseudo código para este protocolo HOP.
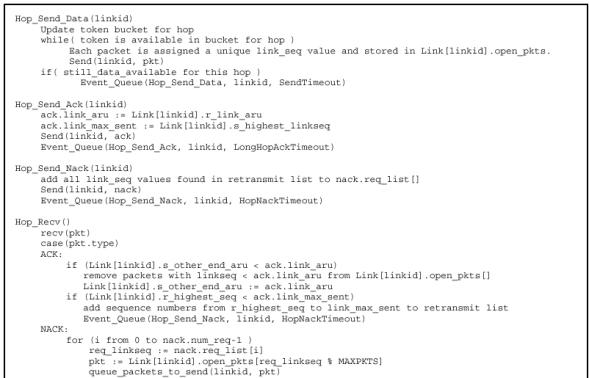
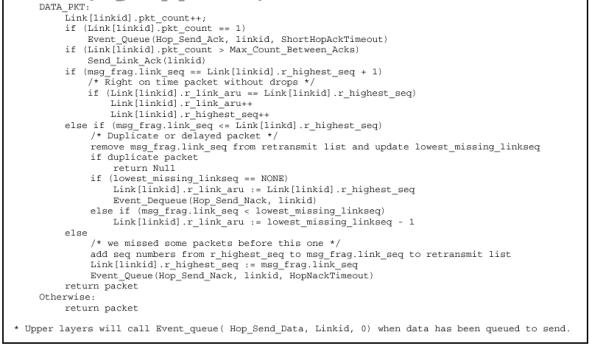
Figura 38 O Protocolo HOP
O protocolo RING é usado quando temos mais do que um daemon
ativo em um site. Note que um site é uma coleção de máquinas que potencialmente
alcançam outras máquinas por uma única mensagem ou seja broadcast de
hardware, multicast de hardware ou IP-multicast. Cada membro tem
um único identificador que é fixo mesmo ocorrendo quedas e reinícios. O
protocolo RING é uma modificação do protocolo RING usado no
projeto TOTEM e TRANSIS (AMIR, 1995).
Nestes projetos o protocolo RING
é usado para prover confiabilidade, fluxo de controle global e ordenamento
global.
SPREAD
usa o protocolo RING para um propósito principal: confiabilidade em
nível de pacote e controle de fluxo com o site local, e um propósito
secundário: estabilidade de nível de mensagem entre os membros do anel. O ponto
crucial é que a mesma ficha (token) é usada para todas estas funções. Na
mesma circulada da ficha, o algoritmo de cálculo do RING aru atualiza
tanto o campo de aru do pacote como da mensagem. Assim não estamos pagando nada
em complexidade e latência no protocolo para conseguir informações a nível de
mensagem. Em contraste com TOTEM e o TRANSIS , ordenamento global e controle de
fluxo são providos pelos protocolos de nível de transporte descritos a seguir.
Isto limita o uso do protocolo RING para tarefas nas quais é mais
efetivo: ordenação, confiabilidade e disseminação em área local.
Em outro extremo, a coleção inteira de daemons pode ser
configurada como um site conectado por roteamento IP-multicast. Esta
configuração não vai ter a vantagem de nossa confiabilidade no protocolo de
rede de longa distância e pode ter uma performance muito pobre.
A ficha (token) que circula contém os seguintes campos:
|
Type
|
Regular exceto
durante as trocas de membro do grupo.
|
|
Link_seq
|
O mais alto
número de seqüência de qualquer pacote confiável enviado no anel.
|
|
Link_aru
|
O número de
seqüência indicando até que pacote foi recebido de forma confiável por todos
os membros do anel. Usado para
controlar quando um link pode descartar qualquer referência local ao pacote.
|
|
Flow_control
|
Um contador do
número de pacotes enviados ao anel durante a ultima rotação da ficha,
incluindo retransmissões.
|
|
Rtr list
|
Uma lista de
todos as seqüências de valores que o dono anterior da ficha está pedindo para
ser retransmitida.
|
|
Site_seq
|
O número mais
alto de seqüência de qualquer mensagem confiável originária neste anel. Esta
seqüência é local ao site e combinada com a identificação do site provê um
identificador único de cada mensagem enviada no sistema.
|
|
Site_lts
|
O mais alto
valor LTS visto por qualquer membro no anel mesmo distante. Isto é usado para
prover um ordenamento consistente e casual para mensagens seguras e com
concordância.
|
|
Site_aru
|
O número LTS
até o qual todos os membros do site tenham recebido todas as mensagens com um
valor de LTS menor que este.
|
|
Site_aru_modifier
|
O
identificador do site membro que
modificou o valor do site_aru pela última vez.
|
Depois
de recebido a ficha o daemon vai tratar qualquer retransmissão
requisitada pelo dono anterior da ficha, depois processa as mensagens recebidas
pelas aplicações clientes, envia os pacotes até o limite imposto pelo controle
de fluxo, depois atualiza a ficha com novas informações e envia para o próximo daemon
no anel. Após mandar a ficha o daemon vai tentar entregar qualquer
mensagem que tenha para as aplicações clientes. Para cada mensagem processada
no sistema, um novo site_seq e site_lts são atribuídos e os contadores são
incrementados. Para cada pacote confiável enviado um único link_seq é atribuído
e o contador incrementado.
Para atualizar os valores do link_aru e do site_aru na ficha, o daemon
compara o valor local do aru com aquele da ficha, se o valor local é menor,
então o valor da ficha é abaixado para o valor local e o campo
site_aru_modifier recebe a identificação do daemon. Se o valor local é
igual ou maior que o valor da ficha, então o daemon altera o valor na
ficha somente se na variável site_aru_modifier estiver com a identificação
deste daemon, ou o site_aru_modifier é zero, indicando que nenhum daemon
tenha diminuido este valor durante a ultima passagem. Todos os membros do anel
podem calcular o mais alto valor que eles localmente podem usar tomando o menor
deste recém calculado valor aru da ficha e o valor aru da ficha que veio da
rodada anterior na ficha.
O protocolo RING prove o controle de fluxo, limitando o número de
pacotes que cada membro pode enviar durante cada rotação da ficha. O número de
pacotes que podem ser enviados em todo o anel para cada rodada, e o limite de
quanto cada membro individual pode enviar a cada rodada são parâmetros de
configuração de performance. O daemon simplesmente envia o mínimo de seu
limite individual e o limite total menos o valor no campo flow_control que foi
enviado na ultima vez. Figura
39 apresenta o pseudo código para o protocolo RING.
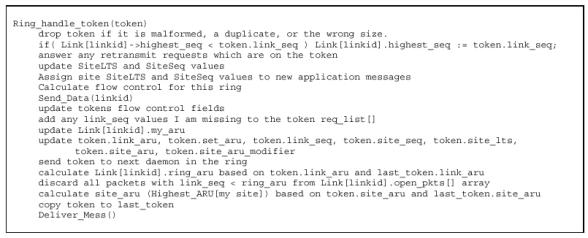
Figura 39 O Protocolo RING
A camada de transporte, que é a camada superior do protocolo, provê as
garantias requeridas para a entrega, ordenação
de mensagens e a semântica de serviços estáveis. A camada de transporte
usa a camada da Rede para disseminação , controle de fluxo local e
confiabilidade na transmissão dos pacotes. Uma mensagem no SPREAD vai
tipicamente passar sobre diversos links enquanto está sendo enviada a
outros daemons. Na ocorrência de falhas o protocolo de transporte em
cada daemon manterá uma cópia completa das mensagens enviadas ou
recebidas até que se torne estabilizada através de todo o sistema, e desta
forma possa prover a retransmissão de
mensagens que foram perdidas durante as trocas entre os membros do grupo, assim
que forem disparados avisos de falha. Os protocolos de recuperação em caso de
falhas não estão sendo discutidos neste ponto.
Ordenação e estabilidade são providas por um protocolo nível de
transporte simétrico que roda em todos os daemons ativos. Usa uma
seqüência única de valores identificando cada mensagem que origina do site, o identificador único
assinalado a cada site, e um tempo de relógio lógico definido pela relação de
Lamports (aconteceu antes), para prover um ordenamento total em todas as
mensagens no sistema e para calcular quando a mensagem se tornou estabilizada. Estabilidade é definida como uma mensagem
que este daemon sabe que todos os outros daemons relevantes
tenham recebido e então esta mensagem pode ser removida do sistema.
A cada mensagem são assinalados os seguintes valores antes da
disseminação:
·
Uma identificação do site
·
Uma seqüência no site
·
Um tempo tipo Lamport (LTS – Lamport Time Stamp)
·
Uma seqüência da sessão
Conseqüentemente uma mensagem pode ser completamente ordenada baseada
estritamente nas informações contidas na mensagem. O uso de um tempo de relógio
lógico e valor de seqüência têm um beneficio substancial de ser completamente
descentralizado e de fazer a recuperação de partições e intercalar de maneira
consistente com a possibilidade EVS. Sem as mensagens ordenadas na origem,
entrega segura e com concordância não podem ser alcançadas através de partições
da rede.
Mensagens não confiáveis têm uma seqüência de sessão separada por que
elas não precisam do suporte requerido para mensagens confiáveis. Já que elas
podem ser descartadas nos não queremos que a sua perda interfira com os
protocolos que tem confiabilidade. A razão de que elas tenham um valor de
seqüência contudo é para ter certeza que o daemon não faça entrega de
copias duplicadas da mensagem para a aplicação e para ter uma forma de
identificar uma especifica mensagem e
então o daemon possa recompor esta mensagem a partir de seus pacotes. Se
alguma porção de uma mensagem, não confiável, não chegar em um especifico tempo
após o primeiro pedaço da mensagem ter chegado, então são descartadas todas as
porções que chegaram. Mensagens não confiáveis são ainda enviadas somente
quando o daemon tem a ficha no anel local por causa de assuntos de controle de fluxo. Mensagens não confiáveis
são enviadas assim que as mensagens cheguem completas e não fazem parte do
protocolo principal de envio descrito a seguir.
Mensagens confiáveis usam a camada de confiabilidade da rede física. Cada link garante transporte confiável
dentro de um tempo limite, independente de falhas no processador ou na rede
física. Assim confiabilidade fim a fim é provida no caso onde não temos falhas devido a todos os pacotes seguirem
através de todos HOPs e RINGs para todos os daemons que
precisam deles. Mensagens confiáveis são enviadas tão logo a mensagem seja
recebida completa já que não é prevista nenhuma garantia de ordenação. Desta
forma o seu envio nunca é atrasado devido a outras mensagens.
Mensagens FIFO têm a mesma garantia de confiabilidade que mensagens
confiáveis. Também temos a garantia que será enviada após todas as mensagens da
mesma sessão com menor valor de seqüência de sessão. Para prover um ordenamento
FIFO por sessão, SPREAD incorre no custo de uma pequena porção de memória por
sessão. Em um sistema ativo com muitas sessões este custo é pequeno comparado
com as áreas de buffer de mensagens requeridos e pode ainda ter considerável
beneficio para latência da mensagem.
Mensagens acordadas são transmitidas em ordem consistente com ambas
ordenações FIFO e tradicional Causal.
Esta ordenação é consistente através dos grupos como um todo. Para prover este
ordenamento com o de acordo, o daemon local envia as mensagens de acordo
com a ordem lexicográfica {LTS, site id} dos campos da mensagem. O
custo é que para ordenar totalmente uma mensagem o daemon precisa ter recebido uma mensagem ou pseudo mensagem
de atualização de cada um dos outros sites com valor que indica não ter
mensagem com um menor {LTS, site id} que já tenha sido transmitido. SPREAD
minimiza este custo por que só requer uma mensagem de cada site, não de cada daemon.
O único potencial método mais rápido requer um seqüenciador o que introduz um
recurso centralizado. Assim sendo um seqüenciador não pode prover EVS em redes
particionadas. Mensagens seguras são enviadas em ordem consistente com
ordenação acordada. Estabilidade é determinada de maneira hierarquica. Cada
site usa o campo Site_aru do anel local para gerar um valor All-Received-Upto para todo o site. Este valor
representa o status de estabilidade do site local. Este valor ARU é então propagado
para todos os outros sites usando a camada de rede física. O valor mínimo do
ARU de todos os sites determina a estabilidade global das mensagens. Mensagens
seguras iguais ou abaixo deste valor podem ser enviadas e todas as mensagens
enviadas iguais ou abaixo destas podem ser descartadas.
SPREAD usa diversas técnicas para otimizar os cálculos necessários para
esta ordenação acima, tais como tabelas hash, listas multi-dimensionais ligadas
e caching.
A interface de
programação de aplicação (API) usada para o SPREAD é composta de poucas
chamadas. A seguir temos um detalhamento da forma como é tratada a situação de
área de memória insuficiente para receber uma mensagem, tipos de dados e
chamadas das funções no SPREAD.
É um comportamento
tradicional nas (API) interfaces de programação para aplicações em redes que
quando um usuário aloca uma área de buffer insuficiente, a API fornece a maior
quantidade de dados que for possível e trunca o resto. Algumas vezes o usuário
recebe a noticia que algum dado foi truncado e outras vezes nenhuma notificação
é dada. Assim é responsabilidade do usuário detectar quando um datagrama é
muito pequeno e recuperar de alguma forma (tal como requisitando novamente o
dado).
A dificuldade com o uso deste enfoque no SPREAD é que quando a aplicação
tem que recuperar este erro, algumas propriedades da mensagem são perdidas. Por
exemplo se a mensagem for do tipo SAFE, os outros membros podem certamente
assumir que ou todos os membros recebem as mensagens ou eles não recebem devido
a alguma interrupção no processo ou
desconexão do SPREAD. Neste caso alguns membros podem pegar parte dos dados ,
mas tem que recuperar o resto, também os dados podem ser perdidos mesmo quando
o processo continua a executar corretamente o que torna difícil para outros
detectar a falha.
Essencialmente porque cada mensagem tem significados intrínsecos tais
como ordenação, ou garantia de confiabilidade, perdas de dados imprevisíveis
por outro lado comprometem em um sistema confiável a semântica valida que
queremos usar. É possível detectar esta perda e recuperar, mas os custos são
significativos, especialmente quando comparados contra os custos de evitar o
problema em primeiro lugar. Assim, diferentemente de datagramas UDP, as
mensagens no SPREAD são projetadas para serem confiáveis mesmo quando ocorrer
buffer insuficiente.
O método usado é bem definido. SPREAD nunca ira truncar mensagens grandes
a menos que explicitamente seja solicitado. Quando você chama SP_receive com um
buffer para dados ou para a lista de grupos insuficiente para os dados a serem
recebidos, a função SP_receive ira retornar com um código de erro de
GROUPS_TOO_SHORT ou BUFFER_TOO_SHORT e nenhum dado ou lista de grupos será
retornado. As únicas informações que irão retornar são os seguintes parâmetros:
·
Service_type que
vai conter o tipo de mensagem.
·
Sender está
vazio.
·
Num_groups retornara o número de grupos
que o parâmetro groups necessita para evitar que ocorra o erro
GROUPS_TOO_SHORT. Este número retorna como um número negativo. Se o parâmetro
groups for suficiente o bastante então o campo num_groups será 0.
·
Groups vazio.
·
Mess_type retorna
com o tipo de mensagem que a aplicação enviou com a mensagem original, este é
apenas um inteiro tipo short int (16 bits).
·
Endian_mismatch recebe
o tamanho, em bytes, da área de buffer de dados que seria necessário para
receber completamente esta mensagem ser dar o erro BUFFER_TOO_SHORT. Este
número é retornado como um número negativo.
·
Mess vazio
Assim, quando SP_receive
retorna um dos erros *_TOO_SHORT você pode examinar os campos service_type e
mess_type para obter informações sobre que tipo de mensagem o SPREAD está
tentando enviar para você. Você pode então examinar os campos num_groups e
endiam_mismatch para descobrir qual o tamanho do buffer que é necessário. Você
então aumenta o buffer da aplicação e chama SP_receive novamente.
Esta forma de recuperação é segura com aplicações multi-thread porque
cada chamada tem sucesso ou falha na sua própria execução e se duas threads
pedem o reenvio de uma mesma mensagem, uma vai receber a mensagem e a outra vai
receber a mensagem seguinte a esta (o mesmo que aconteceria se não houvesse
erro nem retransmissão).
Esta forma de recuperação contudo requer que a aplicação verifique se
ocorreu erro quando chamado SP_receive e se um erro *_TOO_SHORT ocorreu então
ou aumenta a área de buffer ou chama SP_receive novamente com um flag DROP_REC
ligado, como será descrito a seguir. Se o erro for ignorado ou não for
corrigido o tamanho do buffer insuficiente, a aplicação irá continuamente
chamar SP_receive, em um loop e nunca vai receber nada de mensagem (apenas
código de erro que não está tratando).
Se a aplicação não quer
atualmente receber a área de buffer completa seja para dados ou para a lista de
grupos, temos a opção de chamar SP_receive com o campo service_type contendo o
valor correspondente a flag DROP_RECV. Quando isto é feito, SPREAD ira tratar a
mensagem apenas como a maioria dos sistemas de rede e retorna o total de dados
ou lista do grupo que cabe na área de buffer, truncando o restante. Mesmo assim
ainda ira retornar um erro informando a aplicação que ela está perdendo dados.
Em aplicações simples ou aquelas mais relaxadas, ou com requisitos especiais
este tipo de situação, truncar a mensagem, pode ser mais interessante do que
realizar os procedimentos completos de recuperação.
A API do SPREAD usa somente alguns tipos de dados.
|
#define
|
mailbox int
|
|
#define
|
service int
|
|
#define
|
MAX_SCATTER_ELEMENTS 100
|
|
typedef
|
struct dummy_scat_element{
char
*buf;
int
len;
} scat_elemet;
|
|
typedef
|
struct dummy_scatter {
int
num_elements;
scat_element
elements [MAX_SCATTER_ELEMENTS];
} scatter;
|
|
typedef
|
struct dummy_group_id {
int32
id [3];
} group_id;
|
|
|
|
A seguir é
apresentada a sintaxe de chamada das funções em ambiente de programação usando
a linguagem C.
#include <sp..h>
int SP_connect ( const char *spread_name, const
char *private_name, int priority, int group_membership, mailbox *mbox, char
*private_group);
SP_connect é a chamada
inicial que uma aplicação precisa fazer para estabelecer a comunicação com o daemon
SPREAD. Todas as outras chamadas posteriores precisam se referenciar a um valor
de mbox que será inicializado na chamada desta função (mbox é passado por
referência).
O campo spread_name é o nome do daemon SPREAD aonde irá se
conectar. Será uma string de uma das seguintes formas:
·
4803 Conecta
ao daemon SPREAD na máquina local usando UNIX Sockets com socket em
/tmp/4803. Não pode ser usado em WINDOWS.
·
4803@localhost Conecta ao daemon SPREAD
na porta 4803 da máquina local através do loopback TCP/IP. Esta forma pode ser
usada em WINDOWS.
·
4803@host.dominio.br Conecta a uma máquina identificada pelo
nome de domínio “host.domínio.br” na porta 4803.
·
4803@x.y.z.123 Conecta em uma máquina
identificada pelo endereço IP “x.y.z.123” na porta 4803.
O campo private_name é o nome como esta conexão gostaria de ser
conhecida. Precisa ser único na máquina que está executando o daemon. O
nome pode ser de tamanho no máximo igual a MAX_PRIVATE_NAME com caracteres validos
para nome de grupo não contendo o caracter “#”.
O campo priority pode ser
um flag com 0 ou 1, indicando se esta
conexão será uma conexão prioritária ou não. Atualmente não tem efeito.
O campo group_membership
é um valor lógico, representado por um inteiro. Se for igual a 1 então a
aplicação recebera todas as mensagens relativas a alterações nos membros do
grupo para esta conexão, se for 0 então a aplicação receberá apenas mensagens
que contém os dados e nenhuma mensagem informando alterações nos membros do
grupo, tais como particionamento da rede, a chegada de um membro no grupo, a
saída de um membro do grupo, etc.
O campo mbox é um ponteiro para a variável mailbox. Após
a chamada de SP_connect no retorno esta variável conterá o valor de mbox para esta
conexão.
O campo private_group
precisa ser um ponteiro para um string grande o suficiente para comportar pelo
menos o número de caracteres igual a MAX_GROUP_NAME. Após a chamada do
SP_connect irá conter um nome de grupo privativo desta conexão. Este nome de
grupo pode ser usado para envias mensagens do tipo unicast para esta conexão e
ninguém poderá se juntar a este grupo especial.
Para a chamada de SP_connect têm-se os seguintes
valores de retorno:
·
ACCEPT_SESSION em
caso de sucesso na chamada.
·
ILLEGAL_SPREAD o
nome dado para a conexão foi ilegal. Usualmente porque foi um socket
Unix para WINDOWS, um formato impróprio para host ou uma porta ilegal.
·
COULD_NOT_CONNECT chamada
de baixo nivel ao socket falhou não permitindo a conexão ao daemon
SPREAD neste instante.
·
CONNECTION_CLOSED durante
a comunicação para estabelecer a conexão ocorreram erros e a inicialização não
pode ser completada.
·
REJECT_VERSION o
daemon e as bibliotecas usadas na aplicação têm versões incompatíveis.
·
REJECT_NO_NAME não
foi fornecido privat_name.
·
REJECT_ILLEGAL_NAMES o
nome fornecido não está de acordo com as regras (tamanho ou caracteres ilegais)
·
REJECT_NOT_UNIQUE o
nome fornecido não é único neste daemon.
#include <sp..h>
int SP_disconnect ( mailbox mbox);
SP_disconnect precisa ser
chamado quando uma aplicação quer terminar a sua conexão com o daemon
SPREAD. A aplicação pode ter outras conexões ainda abertas para o daemon
e pode abrir uma nova conexão após ter desconectado.
O campo mbox precisa ser
o correspondente à conexão que se está querendo desconectar.
Para a chamada de
SP_disconnect têm-se os seguintes valores de retorno:
·
NORMAL retorna
0 em caso de sucesso.
·
ILLEGAL_SESSION quando
a seção mbox informada não é uma conexão válida.
#include <sp..h>
int SP_join ( mailbox mbox, const char * group);
SP_join permite que esta aplicação se junte, faça
parte do grupo cujo nome é passado no string group. Se o grupo não existe em
nenhum dos daemons SPREAD ele será criado senão irá fazer parte do grupo
já existente, como mais um membro pertencente a este grupo.
O campo mbox é a conexão
a ser usada para se juntar ao grupo, primeiro parâmetro e o string group
representa o nome do grupo ao qual se está pedindo para fazer parte.
Para a chamada de SP_join temos os seguintes valores
de retorno:
·
NORMAL retorna
0 em caso de sucesso.
·
ILLEGAL_GROUP o
nome do grupo está incorreto por alguma razão. Usualmente porque tinha tamanho
zero o tamanho maior que MAX_GROUP_NAME.
·
ILLEGAL_SESSION quando
a seção mbox informada não é uma conexão válida. Usualmente porque não está
ativa.
·
CONNECTION_CLOSED durante
a comunicação ocorreram erros e o processo de juntar-se ao grupo não pode ser
iniciado.
#include <sp..h>
int SP_leave ( mailbox mbox, const char *
group);
SP_leave deixa de fazer parte do grupo cujo nome é
passado no string group. Se o grupo não existe em nenhum dos daemons
SPREAD esta operação será ignorada, caso contrário deixara de pertencer a este
grupo.
O campo mbox é a conexão
a ser usada para deixar o grupo, primeiro parâmetro e o string group
representa o nome do grupo do qual está se pedindo para deixar de fazer parte.
Para a chamada de SP_leave temos os seguintes valores de retorno:
·
NORMAL retorna
0 em caso de sucesso.
·
ILLEGAL_GROUP o
nome do grupo está incorreto por alguma razão. Usualmente porque tinha tamanho
zero o tamanho maior que MAX_GROUP_NAME.
·
ILLEGAL_SESSION quando
a seção mbox informada não é uma conexão válida. Usualmente porque não está
ativa.
·
CONNECTION_CLOSED durante
a comunicação ocorreram erros e o processo de juntar-se ao grupo não pode ser
iniciado.
#include <sp..h>
int
SP_multicast ( mailbox mbox, service service_type, const char * group, int16
mess_type, int mess_len, const char * mess);
int SP_scat_multicast ( mailbox mbox, service
service_type, const char * group, int16 mess_type, const scatter scat_mess);
int SP_multigroup_multicast (mailbox mbox,
service service_type, int num_groups, const char groups [ ] [MAX_GROUPS_NAME],
int16 mess_type, int mess_len, const char *mess);
int SP_multigroup_scat_multicast( mailbos mbox,
service service_type, int num_groups, const char groups [ ] [MAX_GROUP_NAME],
int 16 mess_type, const scatter scat_mess );
SP_multicast e suas
variantes, todas podem enviar uma mensagem para um ou mais grupos. A mensagem é
enviada em uma determinada conexão e é marcada como tendo vinda desta conexão.
O tipo de serviço, service_type, é um campo que pode ser preenchido com o tipo
de serviço que esta mensagem requer. Os tipos de serviços válidos para
mensagens são:
·
UNRELIABLE_MESS
·
RELIABLE_MESS
·
FIFO_MESS
·
CAUSAL_MESS
·
AGREED_MESS
·
SAFE_MESS
Este tipo pode ser combinado bit a bit fazendo um ou lógico com outros
flags tal como SELF_DISCARD se desejado. No momento apenas SELF_DISCARD é o
único flag adicional.
Se as versões de SP_multicast ou SP_scat_multicast estão sendo usadas
então somente para um grupo pode ser enviado. Assim o string group precisa
incluir o nome do grupo para onde se quer enviar as mensagens. Se a variante
multigroup está sendo usada, então os grupos são especificados pelo inteiro
num_groups e a tabela de nomes dos grupos chamada groups contendo todos os
grupos para onde a mensagem deve ser enviada. Cada grupo tem um nome de não
mais do que MAX_GROUP_NAME caracteres. Esta tabela deve conter no mínimo tantos
nomes de grupos quanto for o inteiro num_groups passado também como parâmetro.
A aplicação que envia a mensagem, vai apenas enviar uma única mensagem e
o SPREAD vai entregar esta mensagem a todas as conexões que fazem parte de
qualquer um dos grupos listados.
O tipo de mensagem é um inteiro (short 16 bits) que pode ser usado
pela aplicação de forma arbitraria. A intenção é que ele possa ser usado para
identificar diferentes tipos de mensagens de dados que precisam ser
identificados sem que tenha que se analisar o corpo da mensagem.
Se as variações sem scatter (diversas mensagens agrupadas) são
usadas, então um buffer único é passado para a chamada especificando uma
mensagem completa para enviar. O campo mess_len da o tamanho da mensagem em
bytes. O campo mess é um ponteiro para o buffer que contém a mensagem. Para
chamadas usando scatter os dois parâmetros são substituídos por um ponteiro, sact_mess o qual vai apontar
para uma estrutura do tipo sactter. Isto permite que mensagens compostas de
diversas partes possam ser enviadas de uma única vez.
Para as chamadas de SP_multicast têm-se
os seguintes valores de retorno:
·
NORMAL retorna
o número de bytes enviado com sucesso.
·
ILLEGAL_SESSION a mbox informada não é valida.
·
ILLEGAL_MESSAGE a
mensagem tem uma estrutura incorreta, tipo um estrutura scatter não preenchida
corretamente.
·
CONNECTION_CLOSED durante
a comunicação para enviar a mensagem erros
ocorreram e o envio não pode ser completado.
#include <sp..h>
int
SP_receive ( mailbox mbox, service
*service_type, char sender [MAX_GROUP_NAME], int max_groups, int * num_groups,
char groups [ ] [MAX_GROUP_NAME], int16 * mess_type, int * endian_mismatch, int
max_mess_len, char * mess);
int SP_scat_receive ( mailbox mbox, service *service_type, char sender
[MAX_GROUP_NAME], int max_groups, int * num_groups, char groups [ ]
[MAX_GROUP_NAME], int16 * mess_type, int * endian_mismatch, scatter *
scat_mess);
SP_receive é a função
geral de recepção para o SPREAD. Ela recebe não somente mensagens com dados mas
também mensagens de alterações de estado dos membros do grupo para a conexão
corrente. Mensagens para todos os grupos associados a esta conexão vão chegar
na mesma caixa postal, assim a chamada de SP_receive vai pegar uma única
mensagem de qualquer um dos grupos. Após a recepção completa, um número de
campos serão inicializados com os valores indicando meta informações sobre a
mensagem (tais como grupo, tipo de mensagem, forma de representação interna,
etc).
Esta função é a mais complexa usada no SPREAD porque esta é a única
maneira para o sistema retornar informação para a aplicação. O significado de
cada campo muda dependendo se a mensagem é de dados ou de controle de membro.
Na chamada da função SP_receive a mesma ficará bloqueada, não retorna a
aplicação que chamou, se não tiver mensagem para receber.
O campo mbox diz qual a conexão que vai receber a mensagem. O campo
Service_type é um ponteiro para a variável do tipo serviço que informa o tipo
de mensagem que está recebendo. Este pode ser REG_MESSAGE ou MEMBER-SHIP_MESS
informando ser uma mensagem de dados regular ou uma mensagem de controle de
membro do grupo.
O resto dos parâmetros difere em significado dependendo do tipo de
serviço. Se o service_type for REG_MESSAGE ( mensagem de dados) então:
·
sender um
ponteiro para um array de caracteres de tamanho no mínimo
MAX_GROUP_NAME. Estará apontando para o nome do grupo que enviou.
·
max_groups o
número maximo de grupos que foi alocado espaço para o array de grupos
passado na função receive.
·
num_groups um
ponteiro para um inteiro o qual conterá o número de grupos no array
groups.
·
groups um
array que tem até max_group nomes de grupos, cada um deles com um string
de até MAX_GROUP_NAME caracteres. Todos os grupos que estão recebendo esta
mensagem serão listados neste array, a menos que o array seja
muito pequeno e foi escolhida a opção DROP_RECV.
·
mess_type contém
o tipo de mensagem que a aplicação mandou junto com a mensagem original. É um
tipo short int (16 bits). Este valor é também corrigido de acordo com a
representação de bytes para números, antes que a aplicação receba o
valor.
·
endian_mismatch é
inicializado com verdadeiro (1) se a forma como os números são armazenados na
máquina que envia é diferente da máquina que recebe (ordem dos bytes
para representar números que pode variar de uma arquitetura para outra). De
outra forma é incializado com falso (0). Este campo é tratado de forma
diferente quando certos erros acontecem. Já foi explicado anteriormente o uso
deste campo quando o buffer de recepção da mensagem é menor que o
necessário.
·
mess o
corpo da atual mensagem recebida é colocado neste buffer.
·
max_mess_len o
tamanho da mensagem, mess, em bytes. Mensagens maiores do que o buffer
são tratadas de forma especial como já descrito anteriormente.
Se a função
SP_scat_receive é usada ao invés de SP_receive então os campos mess e
max_mess_len são substituídos por uma única estrutura do tipo scatter. Este
conjunto de informações na estrutura, podem ser inicializados para conter
quaisquer buffer que se queira receber e seus tamanhos. Estes buffer
precisam ser áreas de memória validas e eles serão preenchidos na chamada de
recepção na ordem em que eles forem listados.
Se o tipo de serviço for MEMB_MESSAGE (mensagem de membro do grupo) é
especificamente uma mensagem de transição dos membros do grupo, TRANS_MESS
então os significados dos parâmetros passam a ser:
·
sender aponta
para o nome do grupo onde está ocorrendo a alteração.
·
max_groups não
usado.
·
num_groups sempre
com 0.
·
groups esta
vazio.
·
mess_type contém –1.
·
endian_mismatch retorna
com 0.
·
mess vazio.
·
max_mess_len
não usado
Assim, na essência, a
única informação que se recebe é o campo sender o qual contém o nome do grupo
que recebe a mensagem de mudança na transição dos membros do grupo. A
importância do TRANS_MEMB_MESS é que
ela diz a aplicação que todas as mensagens recebidas após ela e antes de
menagens REG_MEMB_MESS para o mesmo grupo são mensagens do tipo limpa, o que
permite colocar estas mensagens em estado consistente antes que ocorra a mudança de membros do grupo
atual.
Se for uma MEMB_MESSAGE e especificamente uma mensagem regular de
transição de grupo, REG_MEMB_MESS, neste caso os parâmetros representam:
·
sender aponta
para o nome do grupo onde está ocorrendo a alteração.
·
max_groups o
mesmo que na mensagem regular.
·
num_groups retorna
com o número de membros no grupo após a alteração.
·
groups contém
uma lista ordenada de todos os nomes de grupo privados dos membros de grupo
após a mudança.
·
mess_type contém
o índice deste processo no array dos membros do grupo.
·
endian_mismatch retorna
com 0.
·
mess contém
o identificador deste grupo que está alterando e uma lista de todos os nomes
dos grupos dos processos que vem junto com o seu processo proveniente da antiga
composição de grupos para a nova composição de membros do grupo.
·
max_mess_len
o mesmo que na mensagem regular.
Na área de dados do buffer serão incluídos os
seguintes campos de tamanho fixo:
·
group_id;.
·
Int
num_members;
·
Char
trans_members [] [MAX_GROUP_NAME];
O array groups terá num-members nomes de grupos, cada um deles
como um string tamanho fixo. O conteúdo do array groups é
dependente do tipo de transição que ocorreu conforme segue:
·
CAUSED_BY_JOIN trans_member
contém o nome do grupo que se juntou ao processo.
·
CAUSED_BY_LEAVE trans_member
contém o nome do grupo que esta deixando o processo.
·
CAUSED_BY_DISCONNECT trans_members contém o nome do
grupo que está desconectando do processo.
·
CAUSED_BY_NETWORK trans_members
contém os nomes dos grupos da nova configuração que vieram com o meu processo
para formar o novo conjunto de membros .
Se for uma mensagem
MEMB_MESSAGE e se não for REG_MEMB_MESS nem TRANS_MEMB_MESS então representa
exatamente a situação onde o membro que esta recebendo esta mensagem está
deixando o grupo e esta é a notificação que a saída ocorreu, o que é chamado as
vezes de mensagem de saída por si próprio. O teste mais simples para mensagens
de auto desconexão do grupo e verificar se CAUSED_BY_LEAVE e REG_MEMB_MESS são
falsos, então será uma mensagem de auto desconexão do grupo.
As mensagens TRANS_MEMB_MESS nunca terão um tipo CAUSED_BY_type porque
elas somente servem para sinalizar onde entrega de mensagens do tipo SAFE ou do
tipo AGREED são garantidas para os membros do grupo antes que ocorra a
transição de membros do grupo.
Para outros membros do grupo que este membro apenas deixou o grupo eles
vão receber um par de mensagens,
sendo TRANS_MEMB_MESS e REG_MEMB_MESS como descrito anteriormente
numa mudança de membros do grupo.
Os campos de SP_receive quando ocorre um recebimento de auto desconexão
do grupo tem as seguintes características:
·
sender aponta
para o nome do grupo onde está ocorrendo a alteração.
·
max_groups o
mesmo que na mensagem regular.
·
num_groups retorna
com 0.
·
groups será
vazio. Isto é porque o processo não é mais parte do grupo.
·
mess_type retorna
com 0.
·
endian_mismatch retorna
com 0.
·
mess contém
o group_id do novo membro do grupo e o nome privado do grupo do membro que está
deixando o grupo.
O buffer de dados vai incluir os seguintes
campos de tamanho fixo:
·
group_id;
·
Int
Num_members;
·
Char
trans_members [ ] [MAX_GROUP_NAME];
O array
trans_members conterá um nome do grupo privado que está deixando o processo já
que esta mudança de membros do grupo ocorreu devido a CAUSED_BY_LAVE.
Para as chamadas de SP_receive e SP_scat_receive
tem-se os seguintes valores de retorno:
·
NORMAL retorna
o tamanho da mensagem recebida com sucesso. .
·
ILLEGAL_SESSION a mbox informada não é valida.
·
ILLEGAL_MESSAGE a
mensagem tem uma estrutura incorreta, tipo uma estrutura scatter não
preenchida corretamente.
·
CONNECTION_CLOSED durante
a comunicação para receber a mensagem erros
ocorreram e o recebimento não pode ser completado.
·
BUFFER_TOO_SHORT o
buffer da mensagem na aplicação é muito pequeno para receber a mensagem
completa.
·
GROUPS_TOO_SHORT a
area de buffer para receber a lista de grupos ou lista de membros que
está sendo recebida.
#include <sp..h>
int SP_equal_group_ids ( group_id g1, group_id
g2);
SP_equal_group_ids prove
uma forma de comparar dois identificadores de grupo que sejam originados de
mensagens membro de grupo. Já que o tipo de dado group-id é considerado
transparente para a aplicação o que o programador pode fazer é usar este dado
ou comparar com outro usando esta função.
Como se pode observar na interface de programação da aplicação SPREAD
encontra-se as funções necessárias para o uso de mecanismo de comunicação em grupo.
Além da função que faz a ligação inicial com o mecanismo de grupo, outras
funções básicas estão disponíveis tais como se associar a um grupo, deixar o
grupo, enviar mensagens para o grupo e receber mensagens para o grupo.
Um ponto importante a ser considerado é o fato que a função de
recebimento de mensagens é única. Assim tanto mensagens contendo dados,
mensagens informando alteração da visão ou mensagens de erro, todas são
recebidas pela mesma chamada de função. Existe um parâmetro passado por endereço
que é alterado na chamada da função de leitura e nos informa se a mensagem que
está sendo recebida é de dados ou de transição de grupo. Se for de transição de
grupo e do tipo inclusão de um novo membro do grupo, a aplicação recebe um
ponteiro que aponta para um array com o nome de todos os membros do
grupo. Na hipótese deste array ter uma dimensão menor do que o numero de
membros do grupo, um valor negativo retorna para informar esta situação e não
vai ocorrer erro de sobreposição de memória por falha na alocação.
Para informações em maior volume existe a possibilidade de que se passe
uma estrutura composta de um número variável de mensagens a qual poderá ser
usado tanto na transmissão quanto na recepção das mensagens.
Após
a seleção do mecanismo de comunicação em grupo SPREAD para uma avaliação de
desempenho, uma série de testes e estudos foram efetuados com o software de
forma a termos uma avaliação, a mais detalhada possível. Inicia-se com a
codificação de uma aplicação para gerência de recursos em ambientes
distribuídos onde um programa de consulta vai interagir com N clientes, membros
de um grupo, recebendo informações de gerência de recursos que estão
disponíveis nestes clientes. Esta aplicação está descrita a seguir no item 8.1.
Outra
avaliação envolvendo um teste de volume, visa avaliar a estabilidade,
escalabilidade e performance em um ambiente de rede WAN. Um programa enviando
uma grande quantidade de mensagens a um grupo de dezenas de máquinas, medindo
os tempos para cada bateria de testes em que se variava o número, tamanho e
tipo de ordenação das mensagens. Os detalhes do ambiente testado e os
resultados encontrados estão descritos a seguir no item 8.2.
Para efetivamente termos uma avaliação do mecanismo de Comunicação em
Grupo selecionado neste trabalho, definimos uma aplicação de gerenciamento de
recursos em ambientes distribuídos composta de duas funções principais, para
serem codificadas usando os recursos do ambiente SPREAD. A primeira função
básica é a coleta de dados, para o tratamento exclusivo da consulta de tempo de
uso de um recurso da rede, na forma de um arquivo de log (arquivo sequencial
gravado em ordem cronológica de ocorrência dos eventos) registrando quando um
micro é ligado ou desligado, que será descrita no item 8.1.3. A segunda função
básica é um gerenciamento em tempo real interagindo com diversos micros
clientes. Neste caso a aplicação é composta basicamente de dois programas, na
forma de mestre escravo. Nesta aplicação o programa escravo é tratado como um
conjunto de escravos que fazem parte do mesmo grupo. Assim cada micro que
estiver sendo gerenciado vai executar uma cópia deste programa cliente, fazendo
parte do grupo. Um programa mestre, de consulta, enviará mensagens aos
programas clientes que identificarão o tipo de consulta e fornecerão a resposta
adequada.
Figura 40 Programa de Consulta e Programas Clientes
Este programa foi implementado para trabalhar em ambiente WINDOWS, como
um aplicativo (daemon) que fica ativo sempre e sem ícone na barra de
tarefas. Quando este programa é iniciado, se conecta ao SPREAD com uma
identificação única (nome da máquina). Este programa só será desativado via
mensagem enviada pelo programa de consulta, mostrado na Figura 40. Todo cliente faz parte de um grupo chamado GG, Grupo
Geral. Este cliente é carregado mesmo antes do processo de login na
estação. Fica sempre aguardando mensagem que vem do grupo GG.
O formato da mensagem é o que
segue:
·
Código da função 1
byte
·
Conteúdo da mensagem variável
até 400 bytes
O programa cliente tem as
seguintes funções:
·
Função 1 – Mostrar mensagem recebida em uma janela tipo
pop-up. Na Figura 41 tem-se um exemplo desta mensagem recebida.
Figura 41
Mensagem do Tipo Pop-Up Enviada a Todos os Clientes
·
Função 2 – Informar se o micro (cliente) está livre,
sem usuário ativo (sem login).
·
Função 3 – Verifica se o software XYZ está
em uso neste cliente.
·
Função 4 – Verifica se existem arquivos com a
terminação XYZ neste cliente. Se
existir, contar quantos arquivos e o total de
k bytes destes arquivos. Responder com o número de arquivos e com o total de k bytes.
·
Função 5 – Verifica se um determinado usuário está
usando este micro cliente. Confere se o login enviado na consulta é o
corrente neste cliente e se for responde com a identificação da máquina.
·
Função Z – Desativa o cliente. Quando recebe este
código Z o cliente encerra a sua
execução.
Figura 42 Tela
de Comandos do Programa de Consulta
Este é um programa que foi implementado em ambiente WINDOWS que vai
interagir com os clientes que estarão fazendo parte do grupo GG. Existe um
botão para selecionar cada uma das funções conforme exemplo da tela mostrada na
Figura 42. Para cada função selecionada, abre uma nova janela
para receber os dados complementares a
esta função. Implementa as seguintes funções:
·
Função 1 - Mensagem Geral. Esta é uma situação de broadcast
geral onde uma mensagem é mostrada em todos os clientes. Exemplo na Figura 43. Recebe a
identificação do grupo e a mensagem que será enviada a todos deste o grupo.
Figura 43 Tela
para Envio de Mensagem Genérica
·
Função 2 – Consulta de micro livre. Manda uma mensagem
de consulta procurando um micro livre e aguarda respostas. Exemplo na Figura 44 Pode receber N respostas que são mostradas em uma
janela com barra de rolagem. Existe um campo de entrada correspondente ao tempo
de time-out, parâmetro na tela já inicializado com 1 minuto, e pode ser
alterado pelo usuário.
Figura 44
Consulta de Micro Livre
·
Função 3 – Consulta de o software XYZ está em uso.
Exemplo na Figura 45. Recebe do usuário
um campo com o nome do software a ser consultado. Manda a mensagem com
código 3, consultando os clientes e aguarda resposta em um determinado tempo
como no item 2. Uma janela vai mostrar todas as máquinas que estão
executando este software.
Figura 45
Consulta se Determinado Software Está em Uso
·
Função 4 – Consulta se tem arquivos do tipo XYZ na
máquina cliente. Exemplo na Figura
46. Recebe um campo com o tipo de arquivo. Manda a
mensagem do tipo 4, de consulta a todos os clientes e mostra o resultado em uma janela onde cada linha tem o nome da
máquina, número de arquivos e tamanho total dos arquivos. Permite classificar
por máquina, número de arquivos, tamanho total. Tem o mesmo controle de time-out
do item 2.
Figura 46
Consulta Tipo de Arquivo em Todos os Micros
·
Função 5 – Consulta se um determinado usuário está
ativo no micro cliente. Exemplo na Figura
47. Recebe o login de um usuário e envia uma
mensagem do tipo 5. Se receber resposta informa onde está o usuário, nome da
máquina. Usa o mesmo controle de de time-out do item 2.
Figura 47 Consulta Usuário
·
Função Z – Desativa
o programa cliente. Se esta solicitação for efetivada, após validar uma senha
de acesso a este recurso, será enviada uma mensagem a todos os clientes e os
mesmos serão encerrados. Em princípio um cliente é ativado quando se liga o
micro, fica sempre executando, até que a máquina seja desligada.
No mecanismo de Comunicação em Grupo que foi
usado para a aplicação descrita
anteriormente, todas as informações relativas às transições de estado
estão disponíveis automaticamente.
Assim para cada cliente que é ativado ou desativado, esta mudança nos
membros do grupo se reflete em uma mensagem de transição de estado que é
enviada pelo SPREAD para todos os membros do grupo.
Aproveitou-se esta facilidade e foi
desenvolvido um programa para ficar executando continuamente no mesmo
equipamento onde está o daemon do SPREAD. Este programa em ambiente
LINUX, tem como objetivo gravar um log com registros onde serão informadas data
e hora que cada cliente foi ativado e desativado. Com esta facilidade passamos
a ter um log que nos mostra a hora que o micro foi ligado e a hora que o micro
foi desligado. Como as máquinas que estão sendo avaliadas estão na mesma rede
local, onde está o daemon do SPREAD não se tem problemas com
particionamento de rede.
Figura
48
Relatório de Uso de um Micro
Desta forma um outro programa de
visualização seleciona e tabula os registros de logs de conexão de um
determinado micro, apresentando um gráfico de uso (máquina ligada) do mesmo em
determinado período de tempo, conforme Figura
48. Em cada linha é representado um dia do mês e a linha
contínua mostra o tempo de uso no período de 0 até 24 horas sendo que cada
segmento representa um quarto de hora. As letras “R” representam um indicativo
de desliga/liga em horários muito próximos ou seja um reboot no sistema..
As informações gravadas em cada registro de log têm o seguinte formato:
·
AAMMDD – Data no formato ano, mês e dia.
·
HH:MM:SS – Hora no formato hora, minuto e segundo.
·
E – Estado sendo C para conexão e D para desconexão.
·
NOMEDOMICRO – Nome do micro que está sendo logado
Este programa gerador de log é ativado como
um serviço na partida do sistema e somente será desativado quando o sistema for
desligado. O arquivo de log é incremental e será rotacionado na rotina padrão
de tratamento dos demais logs do sistema.
Para a experimentação prática deste
mecanismo de comunicação em grupo SPREAD, além do aplicativo de gerência de
recursos em sistemas distribuídos descrito anteriormente, uma série de testes
foram realizados em ambiente de rede real, nas instalações da UNIVALI, visando
avaliar o comportamento do software quanto a escalabilidade e performance.
Foram feitos testes com diversas configurações de rede, considerando um
segmento único com um servidor único bem como com segmentos múltiplos de rede,
interligados via WAN, e também múltiplos servidores rodando o software SPREAD.
Esta arquitetura da rede usada será descrita no item seguinte, 8.2.1.
Todos os testes foram realizados usando
sistema operacional LINUX e WINDOWS e
os aplicativos desenvolvidos para este trabalho foram compilados e avaliados
nos dois ambientes de sistema operacional. Os primeiros testes, durante o
desenvolvimento dos aplicativos sempre envolveram um servidor LINUX executando
o daemon SPREAD e algumas máquinas clientes (em torno de 5 a 10)
existentes no mesmo ambiente físico do local de trabalho. Quando do
desenvolvimento e testes em ambiente doméstico, sempre envolvia um notebook
rodando LINUX e um micro de mesa rodando WINDOWS. Como compilador no WINDOWS foi
usado o Visual C Versão 6.0 e no LINUX o GCC.
Como o objetivo do teste era avaliar a
escalabilidade e a performance, foram desenvolvidos alguns programas que
permitissem esta avaliação. A idéia principal era medir o tempo em um determinado cliente pertencente a um
grupo, para o recebimento de N mensagens enviadas ao grupo com um determinado
tamanho e usando diferentes tipos de entrega, quanto ao controle de ordenação,
como confiável ou segura. Foram desenvolvidos os seguintes programas:
·
FLOOENV – para o envio de mensagens a um grupo. Recebe
como parâmetros o número de mensagens a enviar, o tamanho de cada mensagem e o
tipo de ordenação da mensagem.
·
FLOOREC – para o recebimento de mensagens, como cliente
e membro do grupo. Uma vez executado, fica sempre ativo este programa, tratando
cada lote de mensagens recebidas. No inicio de cada lote manda um registro com
os dados deste teste corrente como data e hora, número de mensagens, tamanho da
mensagem, tipo de ordenação e nome do cliente para um grupo chamado log. No
final de cada lote de teste recebido, envia outro registro para o grupo log com
os mesmos dados e a duração de tempo decorrido entre inicio do lote e final do
lote recebido.
·
LOGBM – para gravar os registros de log recebidos via
grupo log. Assim cada programa cliente em cada lote medido, envia dois
registros sendo um no início de recebimento do lote e outro no final de
recebimento do lote.
Devido à falta de um relógio global,
inicialmente foi usado o relógio do programa LOGBM que recebia todos os registros
de log. Como se identifica que este tempo se mantém igual para todos os
clientes, deduz-se que os registros de log são armazenados no servidor e
entregues ao mesmo tempo para o programa que grava o log. Feita uma alteração
no programa cliente, passa-se a trabalhar com o relógio de cada programa
cliente. Assim no registro de início de recebimento de um lote, são enviadas a
data e hora do cliente. No final de recebimento do lote é enviado um registro
com a data e hora final de recebimento, o tempo decorrido entre o inicio e o
fim, bem como o número real de mensagens recebidas pelo programa cliente.
As medidas de performance foram realizadas,
variando o número de mensagens em cada lote e o tamanho das mensagens. As
medidas avaliando escalabilidade foram feitas em um ambiente do 9 máquinas e
comparadas com um segundo ambiente de 167 máquinas fazendo parte de um mesmo
grupo.
Um exemplo da interligação, na Figura 49, mostra estes programas usados no teste de
performance, FLOOENV, FLOOREC e LOGBM.
.
Figura
49
Interligação dos Programas FLOOENV, FLOOREC e LOGBM
A rede normalmente usada para os testes
iniciais é composta de 9 micros clientes em ambiente WINDOWS, e um servidor
LINUX. As placas de rede são todas de 100 Megabits por segundo e todos
os equipamentos estão ligados a um switch departamental caracterizando
um ambiente de rede local ideal sem problemas de colisão, mesmo em grandes
volumes de transmissão. Nos primeiros testes um programa cliente recebia a
mensagem e mostrava o conteúdo recebido na tela. A demora em transmitir a
informação recebida via rede para o dispositivo de vídeo era muito grande
fazendo com que a fila de mensagens no servidor, para este cliente, tenha
alcançado o limite de área alocada. Nesta situação, o servidor como proteção
desconecta o cliente. Este fato ocorria quando era enviado acima de mil mensagens. Posteriormente o programa cliente
foi alterado para simplesmente receber as mensagens e contar quantas foram
recebidas, mostrando na tela um totalizador de mensagens a cada 1000 mensagens
recebidas. Desta forma a desconexão deixou de existir de forma tão freqüente,
passando a ocorrer de forma muito mais esporádica. A Figura 50 mostra esta
rede básica.
Figura
50 Rede
Básica Usada no Teste Prático
Para o teste de volume, onde se atinge um
total de 167 máquinas diferentes, diversos laboratórios em diferentes blocos
são usados. Inclusive em diferentes Campi envolvendo ligação WAN com link de 2
Megabits. Usa-se um total de três servidores LINUX executando SPREAD com os
clientes ligados a estes três servidores de forma distribuída. A Figura 51 mostra esta rede completa empregada no teste de
volume.
Figura 51 Rede Completa Usada no Teste Prático
Cabe ressaltar que durante o período total
de realização do teste, alguns micros clientes tiveram o seu programa de
recebimento de mensagens, FLOOREC, terminado devido a uma desconexão efetuada
pelo SPREAD. Esta aplicação poderia tratar este código de erro informado pelo
SPREAD tentando reconectar dentro de
alguns instantes mas como o propósito era medir tempo de recebimento do lote
completo, este tipo de erro não era recuperado e simplesmente terminava a
aplicação cliente, sendo menos um resultado na amostragem final. Como a
distância física não permite entre um teste e outro reativar estes programas
que eram desconectados do SPREAD eles simplesmente ficaram desativados quando
ocorreu este erro. É valido lembrar que este tipo de desconexão não é um erro e
sim uma proteção para que uma determinada seção, ou seja, um cliente do SPREAD
não venha a causar falta de memória na área para a fila de saída deste cliente.
Estas áreas de buffer para cada seção podem ser configuradas em tempo de
compilação do software. Inicialmente, estavam configuradas para 1000 mensagens
e posteriormente foram alteradas para 2000 mensagens (parâmetro MAX_SESSION em
spread_params.h). Ao longo de todo o teste depois de recolher um total de
15.270 registros de informações no log sendo um de inicio do lote e um de final
do lote para cada máquina que estava no grupo, um total de 37 máquinas tiveram
o programa FLOOREC desativados por esta condição de erro. O Quadro 4 apresenta o número de máquinas por servidor SPREAD.
Em cada linha tem-se a informação do número de máquinas por servidor no início e no final do teste efetuado. Cada
cliente quando de sua ativação recebe como parâmetro um nome distinto para
identificação e o endereço da porta e do daemon SPREAD ao qual se
conecta.
Quadro 4
Número de Máquinas por Servidor SPREAD
|
SERVIDOR SPREAD
|
Número de máquinas
|
|
|
Início
|
Fim
|
|
Balneario Camboriu
|
40
|
40
|
|
CESCIESA
|
79
|
60
|
|
SEPLAN
|
48
|
30
|
|
|
167
|
130
|
Esta mesma distribuição de todos os equipamentos usados no teste de volume, é
apresentada no Quadro 5, agora
distribuídos por local físico.
Quadro
5 Número
de Máquinas por Local Físico
|
LOCAL FÍSICO
|
Número de máquinas
|
|
|
Início
|
Fim
|
|
Lab Letras
|
25
|
14
|
|
Lab CEJURPS
|
15
|
8
|
|
Lab CESCIESA
|
39
|
39
|
|
Lab CTTMar
|
40
|
21
|
|
Balneario Camboriu
|
40
|
40
|
|
SEPLAN
|
8
|
8
|
|
|
167
|
130
|
As medidas foram coletadas de forma
automática, através da gravação de logs. As informações de data e hora,
indicador de começo do lote “c” ou de termino do lote “t” identificação do
micro e do servidor SPREAD onde o mesmo estava ligado, número de mensagens
enviada no lote, tamanho da mensagem em bytes, tipo de ordenação da mensagem,
comentário sobre o lote, hora de inicio no cliente ou hora de fim no cliente,
com duração e número efetivo de mensagens recebidas eram gravadas em cada
registro. Na Figura 52 temos um exemplo com alguns registros deste log.
Figura
52
Exemplo de Arquivo de Log
As medições ocorreram em diversos momentos,
sendo que para cada um deles um parâmetro era variado. Para o parâmetro tipo de
seqüência foram consideradas mensagens dos tipos confiáveis (Reliable) e
mensagens do tipo segura (Safe). Dois tamanhos de mensagem foram
escolhidos 100 bytes e 1000 bytes. O próximo parâmetro a variar foi o número de
mensagens enviadas em cada bateria de testes, tendo sido escolhidos os
seguintes valores: 100, 200, 300, 400, 500, 1000, 2000, 3000, 4000, 5000 e
10000. Assim o número total de execuções do programa que gerava as mensagens
foi de 44 vezes (2 x 2 x 11) sendo que
em cada execução para um total de 167 máquinas tínhamos 334 registros de log.
Se nenhuma máquina tivesse sido desativada durante o teste, chegaríamos a um
total de registros de log de 14.696 registros validos.
Outro fato importante a ser considerado é
que o programa que envia as mensagens também pode eventualmente ser
desconectado pelo SPREAD. Existe uma área de memória para recebimento de
mensagens pelo SPREAD e que em nossa configuração estava definida para 1500
mensagens. Assim se por alguma razão, o servidor SPREAD não consegue dar vazão
às mensagens entrantes, antes que tenha problema de memória, o SPREAD
desconecta a aplicação que está causando esta sobrecarga. A variável que
controla este limite é possível de ser alterada e tem o nome de WATER_MARK em
spread_params.h. Como em algumas baterias
de teste teve-se este problema, isto gerou um conjunto de registros de log
apenas com o início sem os correspondentes registros de fim e estas rodadas
foram ignoradas na amostragem. Em função disto teve-se em nosso arquivo um
total final de 15.270 registros coletados.
As medições ocorreram em duas datas
distintas, formando dois conjuntos de medidas sendo o primeiro para um ambiente
simples de apenas 9 equipamentos e o segundo conjunto de medidas para um
ambiente de 167 equipamentos. Os quadros que seguem, Quadro 6, Quadro
7, Quadro
8 e Quadro
9 mostram os valores obtidos para o ambiente com 9
micros clientes. Para todos os quadros tem-se uma identificação no cabeçalho
com o tipo de mensagem, tamanho da mensagem em bytes e identificação do
ambiente de teste. Nas linhas seguintes temos os dados de cada uma das baterias
de testes realizadas, com as informações de :
·
Número de mensagens enviadas
·
Quantidade de amostras coletadas (quantas estações
clientes responderam ao final de cada bateria de testes)
·
Menor tempo total de transmissão do lote de mensagens
·
Maior tempo total de transmissão do lote de mensagens
·
Tempo médio calculado tomando como base todos os
valores de tempo de resposta de todos os clientes.
Quadro
6
Medidas Rede Simples Mensagens 1000 Reliable
|
Mensagens do tipo
|
|
|
Reliable
|
|
Tamanho da mensagem
|
|
1000 bytes
|
|
Ambiente de rede com 9
micros
|
|
QR1S
|
|
|
|
|
|
|
|
número
|
quantidade
|
tempo em segundos
|
|
mensagens
|
amostras
|
menor
|
maior
|
médio
|
|
|
|
|
|
|
|
100
|
9
|
1
|
2
|
1,66
|
|
200
|
9
|
3
|
4
|
3,33
|
|
300
|
9
|
5
|
5
|
5,00
|
|
400
|
9
|
6
|
7
|
6,44
|
|
500
|
9
|
8
|
8
|
8,00
|
|
1000
|
9
|
16
|
17
|
16,22
|
|
2000
|
9
|
31
|
32
|
31,77
|
|
3000
|
9
|
49
|
50
|
49,11
|
|
4000
|
9
|
66
|
67
|
66,44
|
|
5000
|
9
|
82
|
83
|
82,88
|
|
10000
|
9
|
159
|
159
|
159,00
|
|
|
|
|
|
|
Quadro 7 Medidas Rede Simples Mensagem 1000 Safe
|
Mensagens do tipo
|
|
|
Safe
|
|
Tamanho da mensagem
|
|
|
1000 bytes
|
|
Ambiente de rede com 9
micros
|
|
QR2S
|
|
|
|
|
|
|
|
número
|
quantidade
|
tempo em segundos
|
|
mensagens
|
amostras
|
menor
|
maior
|
médio
|
|
|
|
|
|
|
|
100
|
9
|
1
|
2
|
1,77
|
|
200
|
9
|
3
|
4
|
3,55
|
|
300
|
9
|
5
|
5
|
5,00
|
|
400
|
9
|
6
|
7
|
6,11
|
|
500
|
9
|
8
|
8
|
8,00
|
|
1000
|
9
|
16
|
17
|
16,77
|
|
2000
|
9
|
33
|
33
|
33,00
|
|
3000
|
9
|
49
|
50
|
49,88
|
|
4000
|
9
|
64
|
65
|
64,88
|
|
5000
|
9
|
82
|
83
|
82,77
|
|
10000
|
9
|
160
|
161
|
160,44
|
|
|
|
|
|
|
Quadro 8 Medidas Rede Simples Mensagem 100 Reliable
|
Mensagens do tipo
|
|
|
Reliable
|
|
Tamanho da mensagem
|
|
100 bytes
|
|
Ambiente de rede com 9
micros
|
|
QR3S
|
|
|
|
|
|
|
|
número
|
quantidade
|
tempo em segundos
|
|
mensagens
|
amostras
|
menor
|
maior
|
médio
|
|
|
|
|
|
|
|
100
|
9
|
0
|
1
|
0,55
|
|
200
|
9
|
1
|
2
|
1,22
|
|
300
|
9
|
1
|
2
|
1,88
|
|
400
|
9
|
2
|
3
|
2,44
|
|
500
|
9
|
3
|
4
|
3,22
|
|
1000
|
9
|
4
|
5
|
4,33
|
|
2000
|
9
|
13
|
14
|
13,22
|
|
3000
|
9
|
11
|
11
|
11,00
|
|
4000
|
9
|
25
|
26
|
25,66
|
|
5000
|
9
|
31
|
31
|
31,00
|
|
10000
|
9
|
61
|
62
|
61,66
|
|
|
|
|
|
|
Quadro 9 Medidas Rede Simples Mensagem 100 Safe
|
Mensagens do tipo
|
|
|
Safe
|
|
Tamanho da mensagem
|
|
|
100 bytes
|
|
Ambiente de rede com 9
micros
|
|
QR4S
|
|
|
|
|
|
|
|
número
|
quantidade
|
tempo em segundos
|
|
mensagens
|
amostras
|
menor
|
maior
|
médio
|
|
|
|
|
|
|
|
100
|
9
|
0
|
1
|
0,66
|
|
200
|
9
|
1
|
12
|
1,33
|
|
300
|
9
|
2
|
2
|
2,00
|
|
400
|
9
|
2
|
3
|
2,33
|
|
500
|
9
|
3
|
4
|
3,44
|
|
1000
|
9
|
4
|
5
|
4,66
|
|
2000
|
9
|
13
|
14
|
13,44
|
|
3000
|
9
|
19
|
20
|
19,88
|
|
4000
|
9
|
25
|
26
|
25,88
|
|
5000
|
9
|
33
|
34
|
33,11
|
|
10000
|
9
|
64
|
65
|
64,55
|
|
100000
|
9
|
333
|
334
|
333,33
|
Na segunda etapa do teste as mesmas medidas
foram também tomadas agora porém para um a ambiente de testes envolvendo 167
máquinas . Estes dados estão representados nos quadros Quadro 10, Quadro
11, Quadro
12 e Quadro
13.
Quadro 10 Medidas Rede Completa Mensagem 1000 Reliable
|
Mensagens do tipo
|
|
|
Reliable
|
|
Tamanho da mensagem
|
|
1000 bytes
|
|
Ambiente de rede com 167
micros
|
QR1F
|
|
|
|
|
|
|
|
número
|
quantidade
|
tempo em segundos
|
|
mensagens
|
amostras
|
menor
|
maior
|
médio
|
|
|
|
|
|
|
|
100
|
167
|
1
|
3
|
1,88
|
|
200
|
167
|
3
|
7
|
3,94
|
|
300
|
167
|
4
|
9
|
5,78
|
|
400
|
167
|
6
|
11
|
7,46
|
|
500
|
167
|
8
|
14
|
9,38
|
|
1000
|
167
|
16
|
28
|
18,29
|
|
2000
|
167
|
33
|
54
|
36,10
|
|
3000
|
167
|
50
|
78
|
54,11
|
|
4000
|
167
|
66
|
104
|
72,22
|
|
5000
|
163
|
83
|
124
|
89,05
|
|
10000
|
152
|
166
|
174
|
166,64
|
|
|
|
|
|
|
Quadro 11 Medidas Rede Completa Mensagem 1000 Safe
|
Mensagens do tipo
|
|
|
Safe
|
|
Tamanho da mensagem
|
|
1000 bytes
|
|
Ambiente de rede com 167
micros
|
QR2F
|
|
|
|
|
|
|
|
número
|
quantidade
|
tempo em segundos
|
|
mensagens
|
amostras
|
menor
|
maior
|
médio
|
|
|
|
|
|
|
|
100
|
163
|
2
|
4
|
2,47
|
|
200
|
163
|
3
|
6
|
4,09
|
|
300
|
163
|
5
|
8
|
5,73
|
|
400
|
163
|
6
|
11
|
7,43
|
|
500
|
163
|
7
|
13
|
9,10
|
|
1000
|
163
|
17
|
25
|
18,31
|
|
2000
|
163
|
33
|
49
|
35,26
|
|
3000
|
163
|
49
|
73
|
52,80
|
|
4000
|
163
|
65
|
97
|
70,52
|
|
5000
|
163
|
82
|
121
|
87,79
|
|
10000
|
154
|
166
|
186
|
168,33
|
|
|
|
|
|
|
Quadro 12 Medidas Rede Completa Mensagem 100 Reliable
|
Mensagens do tipo
|
|
|
Reliable
|
|
Tamanho da mensagem
|
|
100 bytes
|
|
Ambiente de rede com 167
micros
|
QR3F
|
|
|
|
|
|
|
|
número
|
quantidade
|
tempo em segundos
|
|
mensagens
|
amostras
|
menor
|
maior
|
médio
|
|
|
|
|
|
|
|
100
|
152
|
0
|
2
|
0,35
|
|
200
|
152
|
1
|
2
|
1,19
|
|
300
|
152
|
1
|
36
|
8,12
|
|
400
|
152
|
2
|
3
|
2,42
|
|
500
|
152
|
2
|
4
|
2,83
|
|
1000
|
152
|
4
|
5
|
4,72
|
|
2000
|
152
|
7
|
9
|
7,95
|
|
3000
|
152
|
12
|
13
|
12,15
|
|
4000
|
152
|
15
|
17
|
15,44
|
|
5000
|
152
|
26
|
29
|
28,05
|
|
10000
|
73
|
97
|
98
|
97,39
|
|
|
|
|
|
|
Quadro 13 Medidas Rede Completa Mensagem 100 Safe
|
Mensagens do tipo
|
|
|
Safe
|
|
Tamanho da mensagem
|
|
100 bytes
|
|
Ambiente de rede com 167
micros
|
QR4F
|
|
|
|
|
|
|
|
número
|
quantidade
|
tempo em segundos
|
|
mensagens
|
amostras
|
menor
|
maior
|
médio
|
|
|
|
|
|
|
|
100
|
73
|
0
|
1
|
0,63
|
|
200
|
73
|
1
|
2
|
1,19
|
|
300
|
73
|
1
|
2
|
1,35
|
|
400
|
152
|
2
|
4
|
2,43
|
|
500
|
152
|
2
|
4
|
2,67
|
|
1000
|
152
|
4
|
7
|
5,07
|
|
2000
|
152
|
7
|
9
|
8,14
|
|
3000
|
133
|
13
|
14
|
13,84
|
|
4000
|
133
|
19
|
21
|
19,93
|
|
5000
|
133
|
16
|
18
|
16,90
|
|
10000
|
133
|
33
|
35
|
33,95
|
|
100000
|
132
|
335
|
337
|
336,28
|
Todos os testes dos quadros anteriores foram
feitos exatamente na seqüência apresentada. Se observarmos no início o total de
micros clientes era de 167 e no final, apenas 132 pois diversos clientes foram
desconectados do SPREAD devido a erros ocorridos. Se observarmos o final do Quadro
12 e o inicio do
Quadro 13 vamos notar que tínhamos 152 micros, passou para 73 e
voltou para 152 depois de algum tempo. O que ocorreu aqui foi exatamente um
particionamento na rede onde todos os micros que estavam no servidor SPREAD do
CESCIESA (Quadro 4) saíram do
grupo e voltaram alguns minutos depois. Devido a alguma interrupção de
comunicação entre a rede do CESCIESA e o restante da rede aqueles 79 micros
gerenciados pelo SPREAD do CESCIESA ficaram isolados formando um outro grupo
com os aplicativos esperando mensagens, nenhum programa FlOODER controlando
estes clientes durante alguns minutos e quando a rede voltou a ter conexão
física aqueles clientes voltaram a interagir e dando as respostas conforme pode
ser visto no Quadro 13. Este fato ocorrido não foi identificado durante a
aplicação dos testes pois todos os dados de medidas eram coletados
automaticamente em disco para posterior análise. Quando da análise dos dados,
identificado esta descontinuidade no número de máquinas, foi verificado que um
conjunto completo de máquinas do servidor SPREAD do CESCIESA tinha perdido o
contato em determinado horário. Conferindo também no log do servidor SPREAD que
estava fisicamente na Seplan, pelo horário exato encontramos uma informação de
transição de grupo, informando que em determinado instante, minutos após o
particionamento estava sendo feito um merge entre os membros do grupo e
novo total de membros passava a ser exatamente o mesmo conjunto de membros
anterior ao particionamento. Assim pode-se conferir na prática uma das grandes
vantagens do mecanismo de comunicação em grupo qual seja a propriedade de poder
recompor o grupo se existir um particionamento da rede e posterior recomposição
desta mesma rede.
As medidas coletadas e apresentadas na seção
anterior também deram origem a alguns gráficos comparativos, os quais serão
detalhados a seguir.
Estas medidas referem-se ao tempo médio de
transmissão das mensagens. Assim para cada lote de mensagens enviadas, foi
calculado o tempo médio considerando a soma de todos os tempos dividido pelo
número exato de amostras em cada medição. Na Figura
53 tem-se uma comparação entre os tempos de transmissão
na rede composta de 9 micros versus uma rede com 167 micros. Como pode
ser visto a variação do tempo em segundos é mínima quando se aumenta a rede de
9 para 167 micros. Para este teste foram consideradas mensagens de 1000 bytes
e ordenação do tipo reliable. Mesmo na amostragem mais demorada quando
se envia 10.000 mensagens tem-se uma variação mínima.
Figura 53 Tempo médio
para mensagens em rede com 9 X 167 micros
Uma segunda comparação gráfica nos mostra os
tempos quando se comparam diferentes formas de ordenação no envio das mensagens.
O mecanismo de comunicação em grupo tem tratamento diferente com relação à
ordem de entrega das mensagens ao aplicativo final. Como pode ser visto na
Figura 54 nesta medição específica não se tem variação sendo basicamente o mesmo tempo para mensagens com
ordenação reliable ou safe.
Uma explicação para este fato de não se ter variação é devido à característica
do teste onde a fonte de envio era única e todas as mensagens eram enviadas
seqüencialmente ordenadas pela origem que também era única. Para este teste
foram usados como parâmetros mensagens de 1000 bytes sendo as medidas
tomadas na rede de 167 micros.
Figura 54 Tempo médio para mensagens Reliable X
Safe
A terceira comparação gráfica, apresentada
na Figura 55, nos mostra a variação de tempo quando se envia
mensagens de 100 bytes comparativamente ao envio de mensagens de 1000
bytes. Embora o volume de informações enviado aumente de 10 vezes o tempo médio
de transmissão das mensagens não aumenta na mesma proporção como pode ser visto
no gráfico. Neste teste a ordenação das mensagens usada foi reliable no ambiente de rede com 167 micros.
Estes gráficos aqui mostrados no trabalho
são provenientes dos quadros apresentados na seção anterior. As informações
originais geradas e gravadas no arquivo de log, bem como as planilhas e
gráficos originais, estão no CD em anexo a este trabalho.
Figura 55 Tempo médio
para mensagens de 100 X 1000 bytes
Após o levantamento preliminar de diversos mecanismos de Comunicação em
Grupo que atualmente encontram-se disponíveis, a atenção ficou focada em três
produtos: INTERGROUP, JGROUP e SPREAD. Um estudo mais detalhado foi efetuado
nestes produtos pois a documentação dos mesmos era mais abrangente e permitia
esta avaliação. Os dois primeiros estão voltados exclusivamente para o ambiente
JAVA tendo sido implementados usando a linguagem JAVA. O SPREAD, selecionado
para ser usado no teste de performance e na aplicação de gerenciamento de
recursos em sistemas distribuídos, descritos no capítulo 8, está em ambiente
multiplataforma, sendo desenvolvido em C, fortemente aderente a plataforma UNIX.
Este estudo nos mostrou a importância dos mecanismos de comunicação em
grupo pois com o uso deste recurso pode-se abstrair de quantas máquinas
clientes tem-se no ambiente, quando do desenvolvimento de qualquer aplicação
para ambientes de sistemas distribuídos. Fazer a mesma aplicação de
gerenciamento de recursos aqui desenvolvida como exemplo de uso de comunicação
em grupo, sem esta ferramenta, implicaria em uma preocupação de dimensão
proporcional ao tamanho da rede que se quer gerenciar tornando o aplicativo
praticamente impossível quando a escala atingir algumas dezenas de máquinas.
Todos os tratamentos de erros em ambiente WAN ficariam enviáveis para uma
aplicação stand-alone.
Não apenas para aplicações relativas ao sistema operacional mas também
para aplicações comerciais é possível e plenamente viável o uso dos mecanismos
de comunicação em grupo. Como exemplo podemos citar aplicações de replicação de
arquivos de log, replicação de servidores WEB e replicação de banco de dados.
Em relação à performance e escalabilidade, pode-se observar que o
ambiente SPREAD tem ótima escalabilidade, produzindo tempos de resposta
plenamente adequados durante os testes com a variação do número de componentes
envolvidos. Tanto no volume de pequena rede com 9 micros ou no teste chamado de
rede completa com 167 micros tive-se um
tempo de resposta muito semelhante o que nos permite concluir que o
SPREAD funciona de forma eficiente quando se aumenta de dezenas para centenas
de máquinas. Naturalmente deve-se considerar que no teste de pequena rede foi
usado um daemon SPREAD e no teste de rede completa usamos três daemon
SPREAD. Este mecanismo de comunicação
em grupo escala muito bem, bastando para isso apenas ir acrescentando novos daemon SPREAD em nossa rede à medida que o número de clientes for
incrementado em algumas dezenas.
Outra consideração a ser feita sobre performance está relacionada com o
tipo de ordenação das mensagens. Embora o SPREAD trabalhe com diferentes tipos
de ordenação de mensagens tais como sem ordem, FIFO, CAUSAL e SAFE para o tipo
de teste realizado, basicamente não se teve diferença de tempo. O processo de
ordenação faz sentido quando tem se diversas fontes de envio simultâneo para o
grupo. Em nosso teste como era única fonte de envio para o grupo deixa de
existir a importância desta característica de ordenação.
Uma sugestão de melhoria no produto, seria a possibilidade de reconfiguração
dinâmica no SPREAD. Hoje quando se
inclui um novo servidor na rede SPREAD todos os nós têm que ser desativados e
reativados. A idéia seria usar os algoritmos de particionamento e reagrupamento
de membros do grupo já existentes, para esta passagem dinâmica dos clientes de
um servidor que está sendo desativado para um novo servidor já reconfigurado.
Assim uma nova configuração seria iniciada em qualquer ponto da rede e através
de um comando de gerência, receberia toda a partição do servidor que precisa de
manutenção.
Quanto a futuros desenvolvimentos, pode-se pensar em diversas aplicações
usando este recurso de comunicação em grupo, tais como, replicação de
servidores de banco de dados, servidores WEB, programas que simulam um quadro
branco, replicando imagens em uma ambiente de ensino a distância e qualquer
outra aplicação que envolva a comunicação de um aplicativo para N clientes.
Complementando a aplicação de gerenciamento de recursos em sistemas
distribuídos apresentada neste trabalho fica a sugestão de refazer a mesma
usando a linguagem de programação e o ambiente JAVA, considerando que o SPREAD
tem as suas funções implementadas em classes JAVA, permitindo assim que o
programa de consulta possa ser executado em ambiente WEB.
AMIR, Y. Replication using Group
Communication over a Partitioned Network
Ph.D. Thesis. Jerusalem: Institute of Computer Science, The Hebrew
University of Jerusalem, 1995.
AMIR, Y.; STANTON, J. The SPREAD
Wide Area Group Communication System. Baltimore: Technical report, Center
of Networking and Distributed Systems, Johns HOPkins University,1998. Disponível
em <http://www.cnds.jhu.edu/publications/>.
Acesso em: agosto de 2001.
ATTIYA H.; WELCH J. Distributed
Computing: Fundamentals, Simulations and Advanced Topics. London:
McGraw-Hill, 1998.
BERKET, K., The InterGroup
Protocols: Scalable Group Communication for the Internet. Dissertation,
University of California – USA 2000. Disponível em <http://www-itg.lbl.gov/InterGroup>. Acesso em: dezembro de 2001.
BIRMAN, K; RENESSE, R. Van. Reliable
Distributed Computing with the ISIS Toolkit, Los Alamitos: IEEE Computer Society Press, 1994.
BIRMAN, K. Projeto
ISIS Pagina do professor BIRMAN, disponível em <http://www.cs.cornell.edu/Info/Department/Annual95/Faculty/Birman.html>
e <http://www.cs.cornell.edu/Info/Projects/ISIS/>. Acesso em: março de 2002.
BROADCAST Technical Report
Series: Basic Research On Advanced Distributed Computing from Algorithms to
SysTems, 1997. [online] Disponível em
<http://www.newcastle.research.ec.org/broadcast>. Acesso em: maio de 2002.
BUYYA, R. High Performance
Cluster Computing: Architecture and Systems, vol 1. pags 3-45, New Jersey:
Prentice Hall, 1999.
COULOURIS G.; DOLLIMORE J.; KINDBERG
T. Distributed Systems Concepts and Design. 3.ed. Harlow, England: Addison Wesley, 2001.
DIETZ, Hank LINUX Parallel
Processing HOWTO, 1998 [online]. Disponível em <http://yara.ecn.purdue.edu/~ppLINUX/PPHOWTO/pphowto.html>.
Acesso em: outubro de 2001.
DOLEV, D.; MALKI, D. The Transis Approach to High Availability
Cluster Communication. New York: Communications of the ACM, 39(4), April
1996.
EMMERICH W. EngineeRING
Distributed Objects. Chichester: John Wiley
& Sons Ltd, 1999.
EZHILCHELVAN, P.; MACEDO, R.;
SHRIVASTAVA, A. NEWTOP: A Fault-tolerante Group Communication Protocol.
Vancouver: Proceedings of the 15th IEEE International Conference on
Distributed Computing Systems, pag
296-306, maio 1995.
GALLI, D.L. Distributed Operating
Systems Concepts and Practice. New Jersey: Prentice
Hall, 1998.
HAYDEN, M. The Ensenble System.
PhD Thesis, Ithaca,NY: Department of Computer Science, Cornell University,
January 1998.
KAASHOEK, M.F.; TANENBAUM, A.S. Group
Communication in AMOEBA and its applications, Distributed Systems
EngineeRING Journal, vol 1, pp 48-58, julho1993 [online]. Disponível em
<http://www.cs.vu.nl/vakgroepen/cs/amoeba_papers.html>.
Acesso em: janeiro de 2002.
KOCH, R.R. The Atomic Group
Protocols: Reliable Ordered message delivery for ATM networks. PhD
Dissertation, Department of Electrical and Computer EngineeRING, Santa Barbara:
University of California, December 2000.
MALLOTH, C. Conception and Implementation of a
Toolkit for Building Fault-Tolerant Distributed Applications in Large-Scale
Networks. PhD thesis, Lausanne, Switzerland: Ecole
Polytechnique Federale de Lausanne, September 1996.
MONTRESOR, A. System Support for
Programming Object-Oriented Dependable Applications in Partitionable Systems.
Technical Report UBLCS-2000-10 Department of Computer Science, Bologna:
University of Bologna, 2000. Disponível em <http://www.cs.unibo.it>.
Acesso em: dezembro de 2001.
MOSER, L. E.; AMIR, Y.;
MELLIAR-SMITH, P.M.; AGARWAL, D. A. Extended Virtual Synchrony. Poznan: Proceedings of the 14th
IEEE International Conference on Distributed
Computing Systems, pags 56-65, junho 1994. Los Alamitos: IEEE Computer
Society Press, 1994.
MOSER, L. E.; MELLIAR-SMITH, P.M.;
AGARWAL, D.A.;BUDHIA, R.;LINGLEY-PAPADOULOS, C. Totem: A Fault-Tolerant
Group Communication System. New
York: Communications of the ACM, 39(4), April
1996.
MULLENDER S. Distributed Systems.
2.ed. New York: Addison-Wesley, 1993.
MYRICOM Myrinet Overview, 2001 Disponível em
<http://www.myri.com/myrinet/overview/index.html>. Acesso em: 01 fev 2002.
OMG – Object Management Group. The
Common Object Request Broker: Architecture and Specification, Rev 2.3
OMG Inc., Framingham, Mass., March 1998.
OPEN Group DCE Overview,
1999. [online] Disponível em
<http://www.opengroup.org/dce/info/papers/tog-dce-pd-1296.htm>.
Acesso em: janeiro de 2002.
RADAJEWSKI, J., EADLINE D. Beowulf
HOWTO. 1998. [online] Disponível em
<http://www.LINUXvoodoo.com/howto/HOWTO/Beowulf-HOWTO/Beowulf-HOWTO-4.html>. Acesso em: outubro de 2001.
RENESSE, R. van; BIRMAN, K.P.;
MAFFEIS, S. Horus: A Flexible Group Communication System. New York:
Communications of ACM, 39(4): 76-83, April 1996.
SILBERSCHATZ,
A., GALVIN, P.B. Sistemas Operacionais Conceitos. 5.ed., São Paulo: Prentice-Hall, 2000.
STALLINGS, W. Operating Systems
Internals and Design Principles. 3.ed. New Jersey: Prentice-Hall, 1998.
SUN Microsystems. Java Remote
Method Invocation Specification, Rev 1.50. 1998, Sun Microsystems, Inc., Mountain View,
California, October 1998.
TANENBAUM A. S. Sistemas
Operacionais Modernos, Rio de Janeiro: Prentice-Hall
do Brasil Ltda, 1995.
VERÍSSIMO, P.; RODRIGUES, L. Distributed
Systems for System Architects. Norwell, Massachusetts: Kluwer Academic Publishers, 2001.
WHETTEN, B.; MONTGOMER, Y., T.;
KAPLAN, S. A High Performance Totally Ordered Multicast Protocol.
Proceedings of the International WorksHOP on Theory and Practice in Distributed
Systems, pag 33-57, Dagstuhl Castle, Alemanha, Setembro 1994.
�
RELAÇÃO DE
DIRETÓRIOS NO CD
|
_Textos
|
Arquivos de textos que foram criados tais como a
dissertação ( __dm01.doc) e artigos alem de pdfs correspondentes
|
|
Alberto_montresor
|
Documentação completa do JGROUP, com arquivos fontes em
diversas versões, cópia das paginas da Universidade de Bolonha
|
|
Atomic
|
Tese de
Ruppert R. Koch, The Atomic Group Protocols: Reliable Ordered Message
Delivery for ATM network
|
|
Broadcast
|
Dezenas
de artigos sobre BROADCAST, da pagina da universidade NewCastle - Contem
abstracts e artigos completos com link para estes pesquisadores: Ecole
Polytechnique Fédérale de Lausanne (CH) - André Schiper IMAG-LSR Grenoble (F)
- Sacha Krakowiak INESC Lisboa (PT) - Paulo Veríssimo INRIA Rocquencourt (F)
- Marc Shapiro IRISA Rennes (F) - Michel Banâtre, Michel Raynal Università di
Bologna (I) - Ozalp Babaoglu University of Newcastle (UK) - Santosh
Shrivastava Universiteit Twente (NL) - Sape Mullender
|
|
Cgeyer
|
Material do Cláudio Geyer fornecido no CBCOMP 2001.
Apresentação dos cursos: Programação Distribuída e Paralela; Conceitos
básicos de programação com objetos distribuídos; JAVA Threads e concorrencia;
JAVA RMI; JAVA Sockets; Ordem de eventos em sistemas distribuídos; Algoritmos
de PROBE/ECHO Difusão em uma rede; Algoritmos de eleição; Algoritmos
Paralelos. DECK e artigos sobre DECK (UFRGS)
|
|
Diversos
|
Aqui um conjunto genérico de arquivos que não foram
classificados em outros diretórios... Temos entre outros apressentação PPP
sobre P2P, Capitulo UM do livro sobre Cluster do BUYYA, GFS Storage Cluster
da SISTINA, Apresentação DIPC-MOSIX, Livro de C e C++ Orientação a Objetos de
Sergio Barbosa Vilas-Boas UFRJ, alguns artigos, LATEX e documentação, Slides
SGL-ISCC01, Slides palestra do Jack Stankovic e Ken Birman
|
|
Ensemble
|
THE
ENSEMBLE SYSTEM, Dissertação de Mark Garland Hayden, Cornell University, 1998
|
|
Figuras
|
Figuras que foram usadas neste trabalho, Avaliação de
Mecanismos de Comunicação em Grupo para Ambientes WAN
|
|
InterGroup
|
Todo o
material sobre InterGroup do Karlo Berket, Lawrence Berkeley National
Laboratory
|
|
Logs
|
Arquivos logs obtidos durante experimentação e planilhas
geradas a partir dos arquivos log
|
|
Mosix
|
Artigo
Linux clustering with MOSIX presented by developerWorks
ibm/com/developerworks
|
|
Newtop
|
Artigos,
NEWTOP: A Total Order Multicast Protocol Using Causal Blocks de Macedo,
Ezhilchelvan e Shrivastava e NEWTOP: A Fault-Tolerant Group Communication
Protocol de Ezhilchelvan, Macedo e Shrivastava; University of Newcastle
|
|
Ngc_2001
|
Índice dos artigos apresentados no terceiro NGC Network
Group Communication em 2001 ocorrido em Londres (Nov/2001). O I NGC foi em
Pisa - Italia 1999, o II NGC foi em Stanford, CA,USA 2000
|
|
Phoenix
|
Tese de
Christoph Peter Malloth, Escola Politecnica Federal de Zurich, Conception and
implementation of a toolkit for building fault-tolerant distributed
applications in large scale networks
|
|
Ppt
|
Apresentação em Power Point usada na defesa da dissertação
Avaliação de Mecanismos de Comunicação em Grupo para Ambientes WAN em
18/06/2002
|
|
Programas
|
Todos os programas fontes desenvolvidos neste trabalho,
Avaliação de Mecanismos de Comunicação em Grupo para Ambientes WAN
|
|
Programas_executaveis
|
Todos os programas executaveis deste trabalho, Avaliação
de Mecanismos de Comunicação em Grupo para Ambientes WAN, em ambiente WINDOWS
e um sub diretorio com os executaveis para LINUX
|
|
RMP
|
RMP -
Reliable Multicast Protocol, um paper sobre o mesmo, A HIGH PERFORMANCE
TOTALLY ORDERED MULTICAST PROTOCOL, DE Brian Whetten (University of
California at Berkeley), Todd Montgomery (West Virginia University) e Simon
Kaplan (University of Illinois at Champaign-Urbana).
|
|
Robert_van_renesse
|
Um paper
de Robbert van Renesse, Cornell University, Scalable and Secure Resource
Location
|
|
SPREAD_diversos
|
Diversos documentos em PDF, artigos e users guide
|
|
SPREAD_mail_list
|
Uma relação de todas as mensagens da lista SPREAD desde
06/2000 até 06/2002
|
|
SPREAD_versões_download
|
Diversos arquivos tar, diferentes versões, com
distribuições em binario e fontes do SPREAD, alem de spreadlogd e secure
SPREAD
|
|
Spread-bin-3.16.2
|
SPREAD binários de todas as plataformas, ultima versão
2.16.2
|
|
Spread-src-3.16.2
|
SPREAD fontes da última versão 3.16.2 com makefile para
diferentes plataformas
|
|
TRANSIS
|
Documentação
sobre o TRANSIS, A Framework for Partitionable Membership Service, por Danny
Dolev, Dalia Malki e Ray Strong, The Hebrew University of Jerusalem; The
Transis Approach to High Availability Cluster Communication, por Danny Dolev
e Dalia Malki; An Asynchronous Membership Protocol that Tolerates Partitions,
por Danny Dolev, Dalia Malki e Ray Strong
|
HP - Páginas do Prof. Ademir Goulart,
usadas no Curso de Ciência da Computação - UNIVALI
Em caso de dúvida
entre em contato pelo email:
ademir@univali.br